




Processing method of shock wave test data based on dynamic characteristic compensation
-
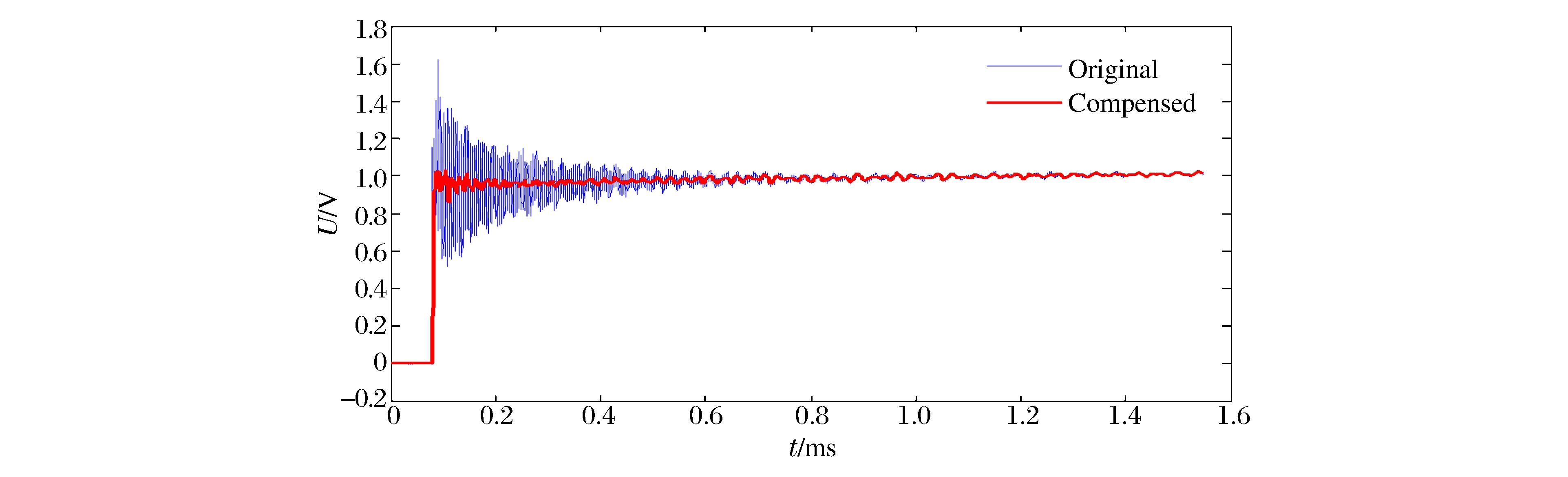
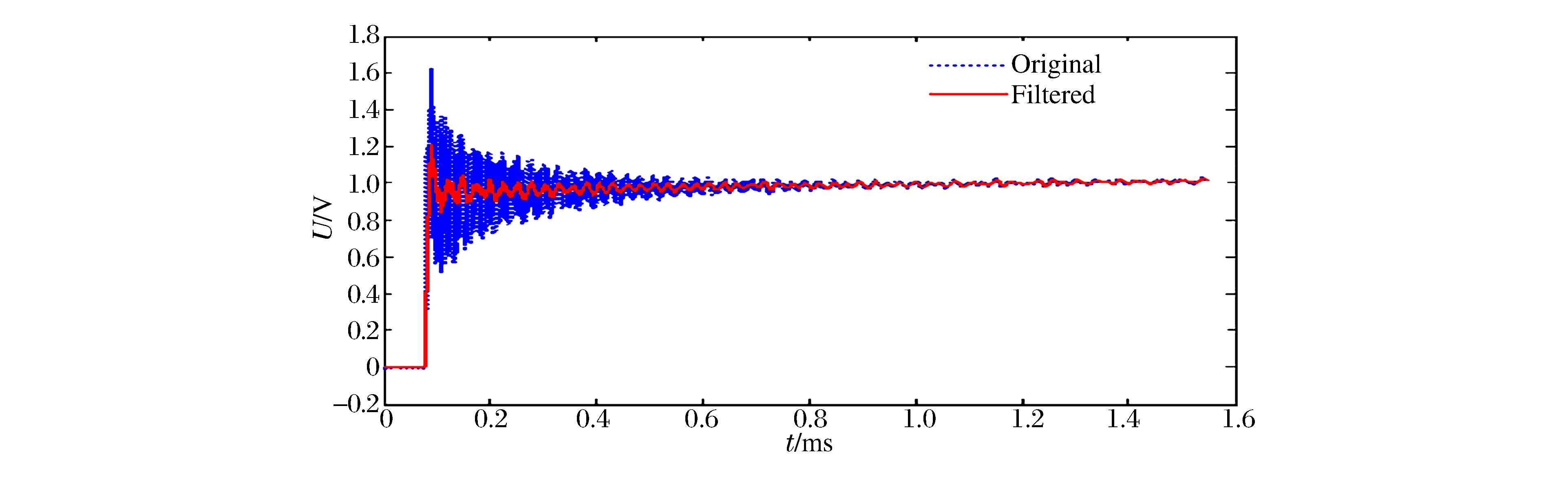
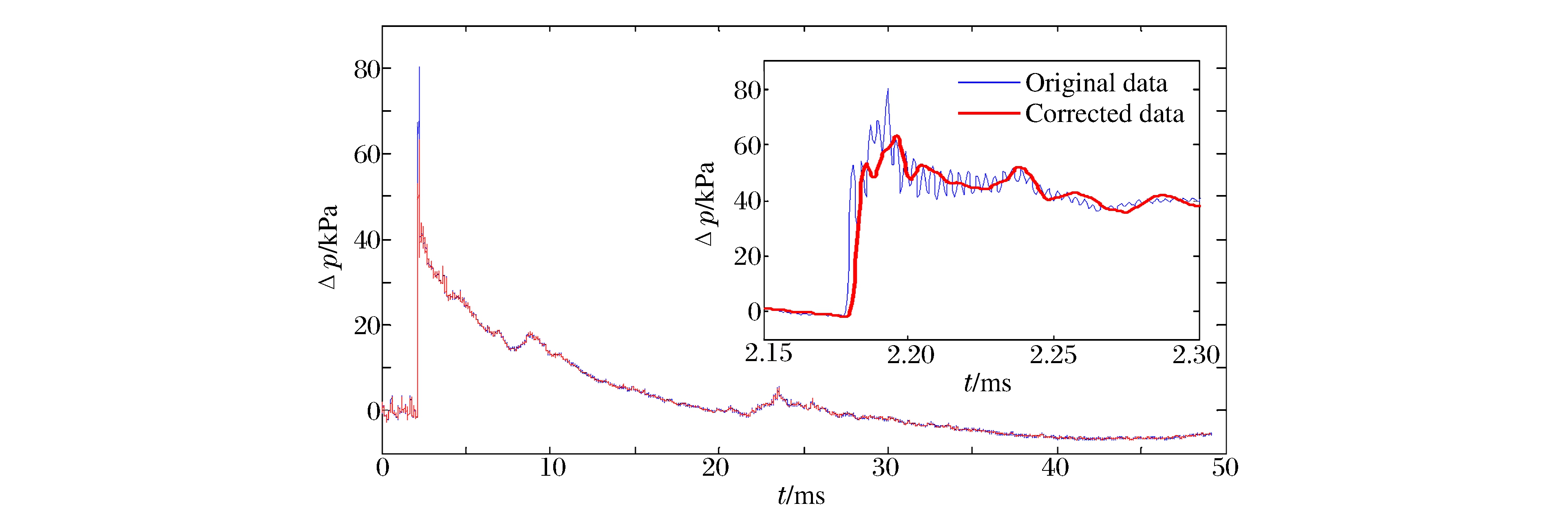
摘要: 利用激波管对传感器进行动态标定,采用特殊白化滤波器广义最小二乘迭代法建立冲击波测试传感器的数学模型并对其动态特性进行分析,提出采用基于零极点相消原理补偿法来对传感器动态特性进行补偿。实际试验的测试数据处理应用表明,基于动态特性补偿的数据处理方法能够提高传感器动态特性和冲击波测试数据的准确度。Abstract: First, the pressure transducer is calibrated using the shock tube. Second, the mathematical model of the pressure transducer is established through the system identification with Generalized Least Square Iterative Method with Special Whitening Filter. According to the model the dynamic characteristics can be obtained. Finally, the dynamic characteristics compensation method based on the zero pole cancellation method is proposed and applied to data processing. Practical application shows that data processing method based on dynamic compensation can improve the dynamic characteristics of the sensor and the accuracy of the test data.
-

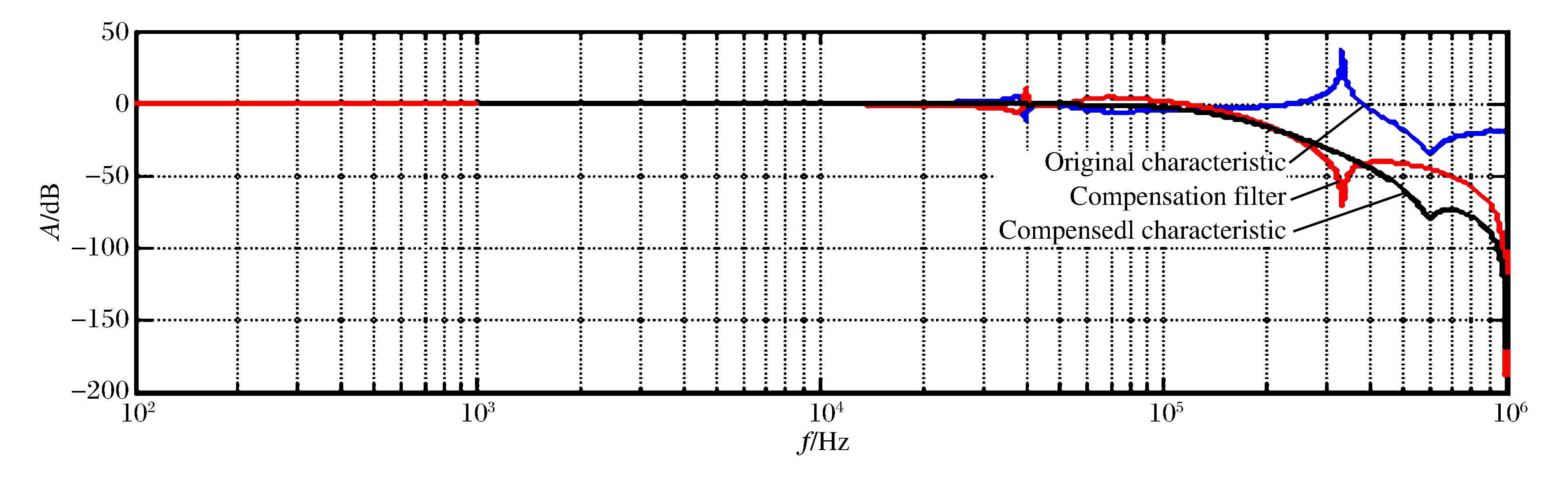
图 4 补偿前后传感器的幅频特性
Figure 4. Original characteristic, compensation filter and compensated characteristic
-
[1] 王跃科, 叶湘滨, 黄芝平, 等.现代动态测试技术[M].北京: 国防工业出版社, 2003: 250-266. [2] Nahman N S, Guillaume M E. Deconvolution of time domain waveforms in the presence of noise[R]. National Bureau of Standards Technical Note 1047. NBS, Boulder, CO, 1981. [3] Raid S M, Stafford R B. Impulse response evaluation using frequency domain optimal compensation deconvolution[C]∥Proc 23rd Midwest Symp on Circuits and Systems. Toledo, OH, 1980: 521-525. [4] 黄俊钦.测试系统动力学[M].北京: 国防工业出版社, 1996: 342-351. [5] 张志杰, 祖静, 张爱萍.多参数模型的反滤波方法研究[J].计量学报, 1999, 20(2): 143-150. http://www.cqvip.com/qk/96248X/199902/3616385.htmlZhang Zhi-jie, Zu Jing, Zhang Ai-ping. Research on inverse filtering with multiparameter model[J]. Acta Metrologica Sinica, 1999, 20(2): 143-150. http://www.cqvip.com/qk/96248X/199902/3616385.html [6] 刘迎春, 叶湘滨.传感器原理设计与应用[M].长沙: 国防科技大学出版社, 1998: 348-354. [7] Steiglitz K, Mcbride L E. A technique for the identification of linear systems[J]. IEEE Transactions on Automatic Contral, 1965(10): 461-464. https://ieeexplore.ieee.org/document/1098181 [8] 孙忠良, 胡成, 史德民, 等.对国内外一些压力标定系统的对比研究[J].兵器试验, 2002(2): 15-23. https://ieeexplore.ieee.org/document/1098181Sun Zhong-liang, Hu Chen, Shi De-ming, et al. Comparative of the domestic and international pressure calibration system[J]. Ordnance Test, 2002(2): 15-23. https://ieeexplore.ieee.org/document/1098181 -

 下载:
下载:

图(8)
计量
- 文章访问数: 3342
- HTML全文浏览量: 473
- PDF下载量: 671
- 被引次数: 0