




Talk about dynamic plasticity and viscoplasticity
-
摘要: 固体力学研究者致力于具有应力-应变本构关系(以下简称为形变型本构关系)的变形体的力学响应研究,而流体力学研究者致力于具有应力-应变率本构关系(以下简称为流动型本构关系)的流动体的力学响应研究。当涉及结构和材料的动态塑性时,到底应该用“塑性变形”还是“塑性流动”来表示?本文从宏观塑性本构理论和微观位错动力学机理两个角度,分别讨论并指出塑性本构关系属于流动型黏塑性率相关本构关系,且同时适用于加载和卸载;因而不应该用应力-应变图来描述塑性加-卸载过程。弹塑性本构关系则是一种形变型和流动型本构关系的耦合。Abstract: The researchers in solid mechanics are interested in studying the mechanical response of deformed solids with stress-strain constitutive relationships (referred to as deformation-type constitutive relations), while the researchers in fluid mechanics are interested in studying the mechanical responses of fluids with stress-strain rate constitutive relationships (referred to as flow-type constitutive relations). When the dynamic plasticity of structures and materials is concerned, should it be in terms of plastic deformation or plastic flow? This paper discusses this problem from the macroscopic plastic constitutive theory and the microscopic dislocation dynamic mechanism, respectively, and points out that the plastic constitutive relation belongs to the flow-type viscoplastic rate-dependent constitutive relation, which is suitable for both loading and unloading processes. Therefore, the stress-strain diagram should not be used to describe the plastic loading and unloading processes. The elastic-plastic constitutive relation is the coupling of the deformation-type and flow-type constitutive relations.
-
Key words:
- dynamic plasticity /
- plastic deformation /
- plastic flow /
- dislocation dynamics /
- visco-plasticity
-
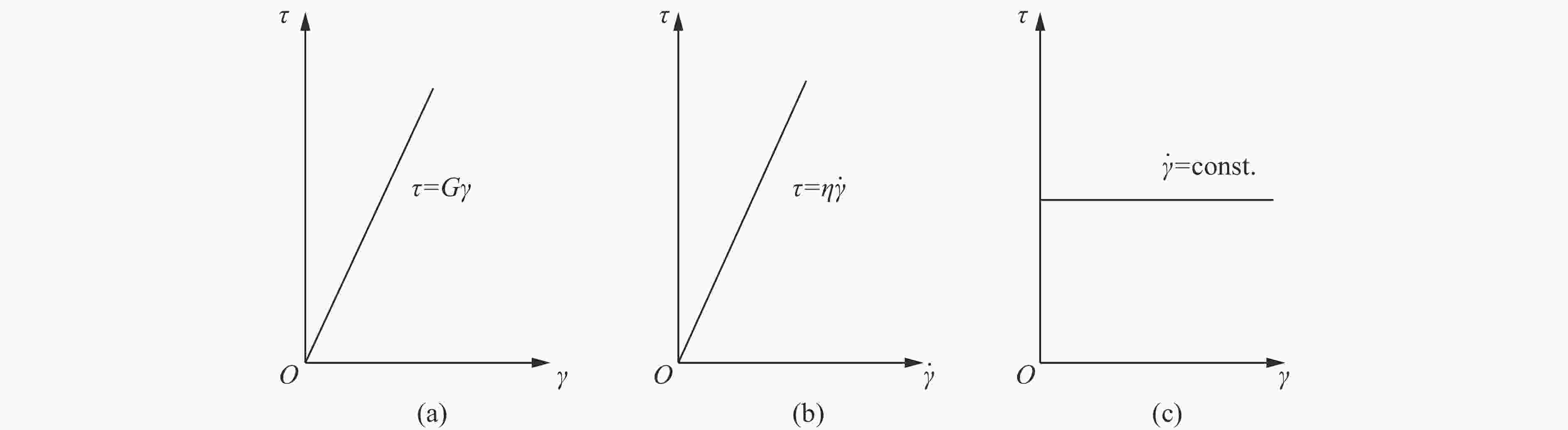
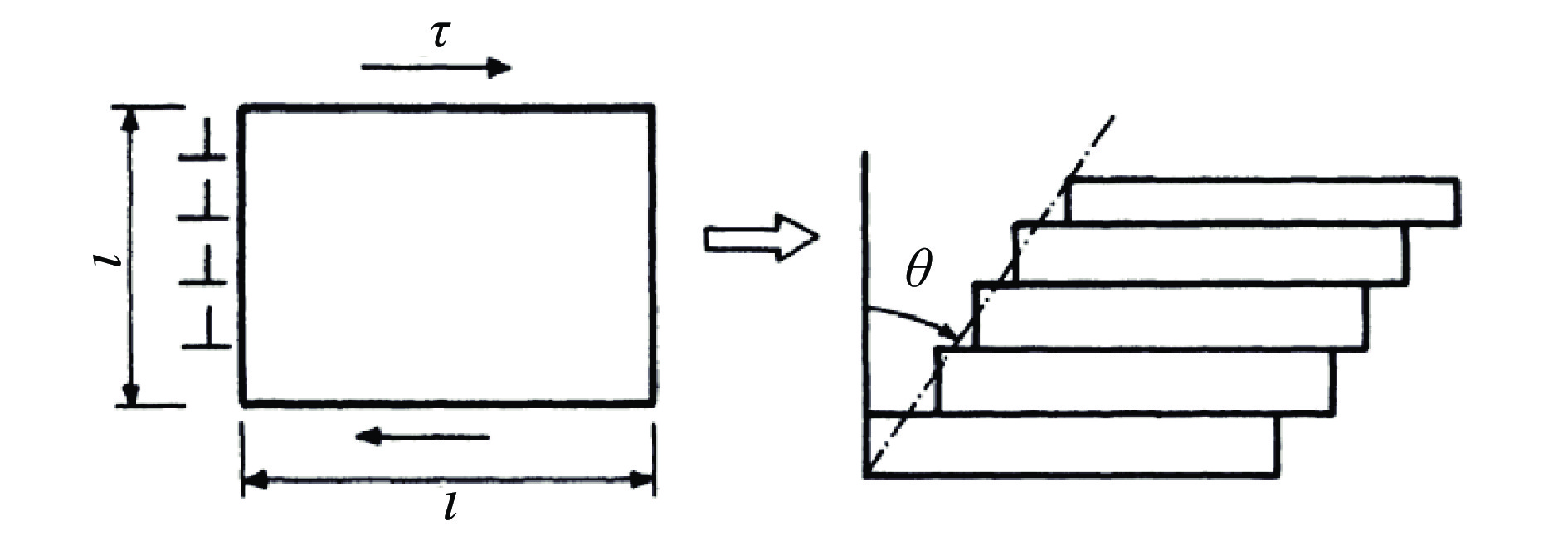
图 1 (a) 在τ-γ坐标中表示的Hooke弹性定律(τ=Gγ);(b)在τ-
$\dot \gamma $ 坐标中表示的Newton黏性定律(τ=η$\dot \gamma $ );(c) 在τ-γ坐标中表示的Newton黏性定律(τ=η$\dot \gamma $ )Figure 1. (a) The Hooke’s elastic law (τ=Gγ) described in τ-γ coordinates; (b) The Newton’s viscous law (τ=η
$\dot \gamma $ ) described in τ-$\dot \gamma $ coordinates; (c) The Newton’s viscous law (τ=η$\dot \gamma $ ) described in τ-γ coordinates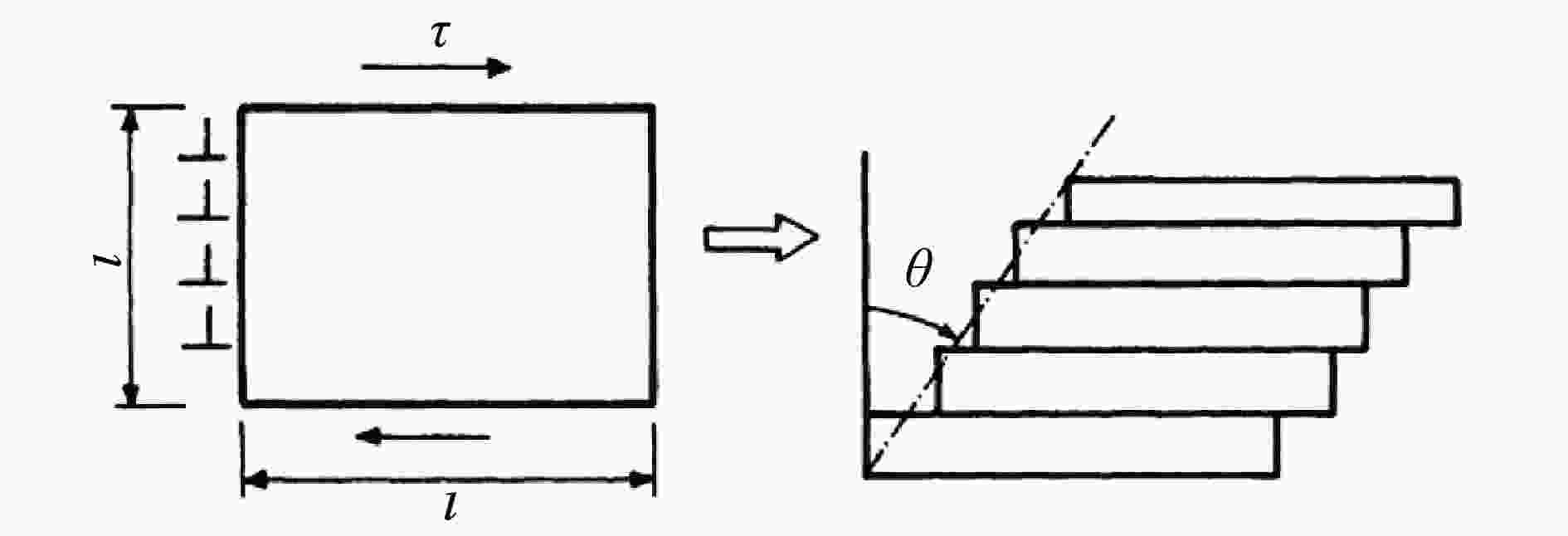
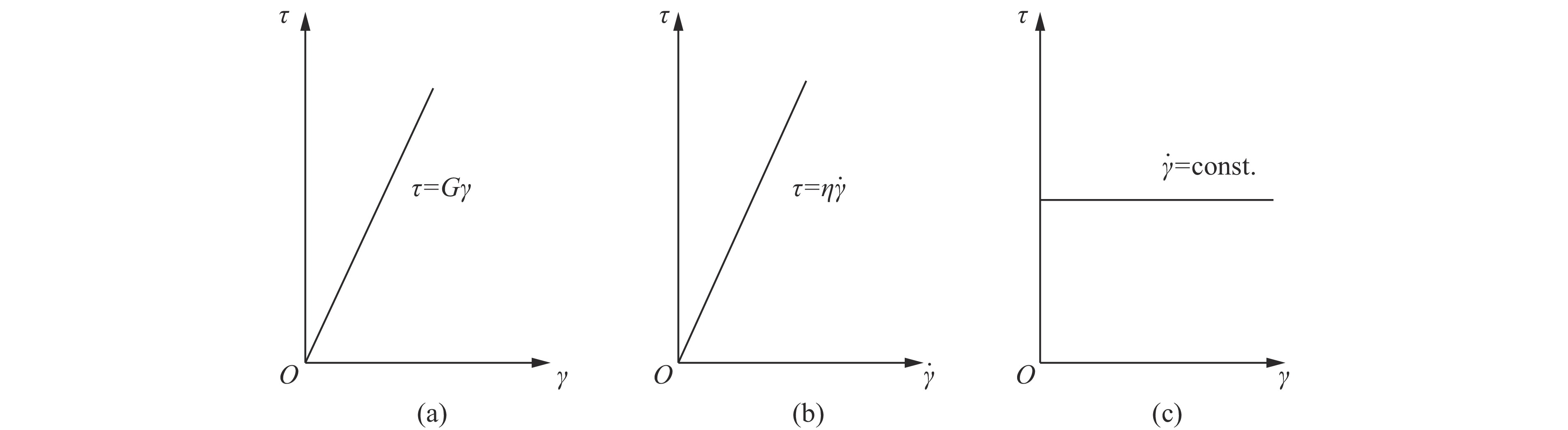
图 4 一列平行位错的运动造成的宏观塑性切应变
Figure 4. The macroscopic plastic shear strain
${\gamma ^{\rm{p}}}\left( {{\rm{ = }}\tan \theta } \right)$ caused by the motion of a row of parallel dislocations
-
[1] 王礼立, 胡时胜, 杨黎明, 等. 材料动力学 [M]. 合肥: 中国科学技术大学出版社, 2017. [2] WANG L L, YANG L M, DONG X L, et al. Dynamics of materials: experiments, models and applications [M]. London: Elsevier Science and Technology Press, 2019. [3] 李敏华, 王仁. 塑性应力应变关系理论的文献总结 [J]. 力学学报, 1958, 2(2): 167–180. [4] 王仁, 黄文彬, 黄筑平. 塑性力学引论: 修订本[M]. 北京: 北京大学出版社, 1992. [5] OROWAN E. Plasticity of crystals [J]. Zeitschrift für Physik A, 1934, 89(9-10): 605–659. DOI: 10.1007/BF01341478. [6] POLANYI M. Lattice distortion which originates plastic flow [J]. Zeitschrift für Physik A, 1934, 89(9-10): 660–662. DOI: 10.1007/BF01341481. [7] TAYLOR G I. The mechanism of plastic deformation of crystals: Part I : theoretical [J]. Proceedings of the Royal Society of London, 1934, A145: 362–387. DOI: 10.1098/rspa.1934.0106. [8] OROWAN E. Problems of plastic gliding [J]. Proceedings of the Royal Society of London, 1940, 52(1): 8–22. DOI: 10.1088/0959-5309/52/1/303. [9] DAVIDSON D L, LINDHOLM U S. The effect of barrier shape in the rate theory of metal plasticity based on crystal dislocations [C] // Proceedings of the Conference on Mechanical Properties at High Rates of Strain. Oxford: The Institute of Physics, 1974: 124−137. [10] KOCKS U F, ARGON A S, ASHBY M F. Thermodynamics and kinetics of slip [J]. Progress in Materials Science, 1975, 19: 1–5. DOI: 10.1016/0079-6425(75)90005-5. [11] WANG L L. A thermo-viscoplastic constitutive equation based on hyperbolic shape thermo-activated barriers [J]. ASME Journal of Engineering Materials and Technology, 1984, 106(4): 331–336. DOI: 10.1115/1.3225726. [12] ZERILLI F J, ARMSTRONG R W. Dislocation-mechanics-based constitutive relations for material dynamics calculations [J]. Journals of Applied Physics, 1987, 61(5): 1816–1825. DOI: 10.1063/1.338024. [13] FOLLANSBEE P S, KOCKS U F. A constitutive description of the deformation of copper based on the use of the mechanical threshold stress as an internal state variable [J]. Acta Metallurgica, 1988, 36(1): 81–93. DOI: 10.1016/0001-6160(88)90030-2. [14] 刘叔仪. 关于固体的现实应力空间 [J]. 物理学报, 1954, 10(1): 13–34. DOI: 10.7498/aps.10.13. -







 下载:
下载:




计量
- 文章访问数: 6340
- HTML全文浏览量: 2350
- PDF下载量: 288
- 被引次数: 0