




Experimental study on high-velocity oblique water entry ofa trans-media vehicle with tail-skirt
-
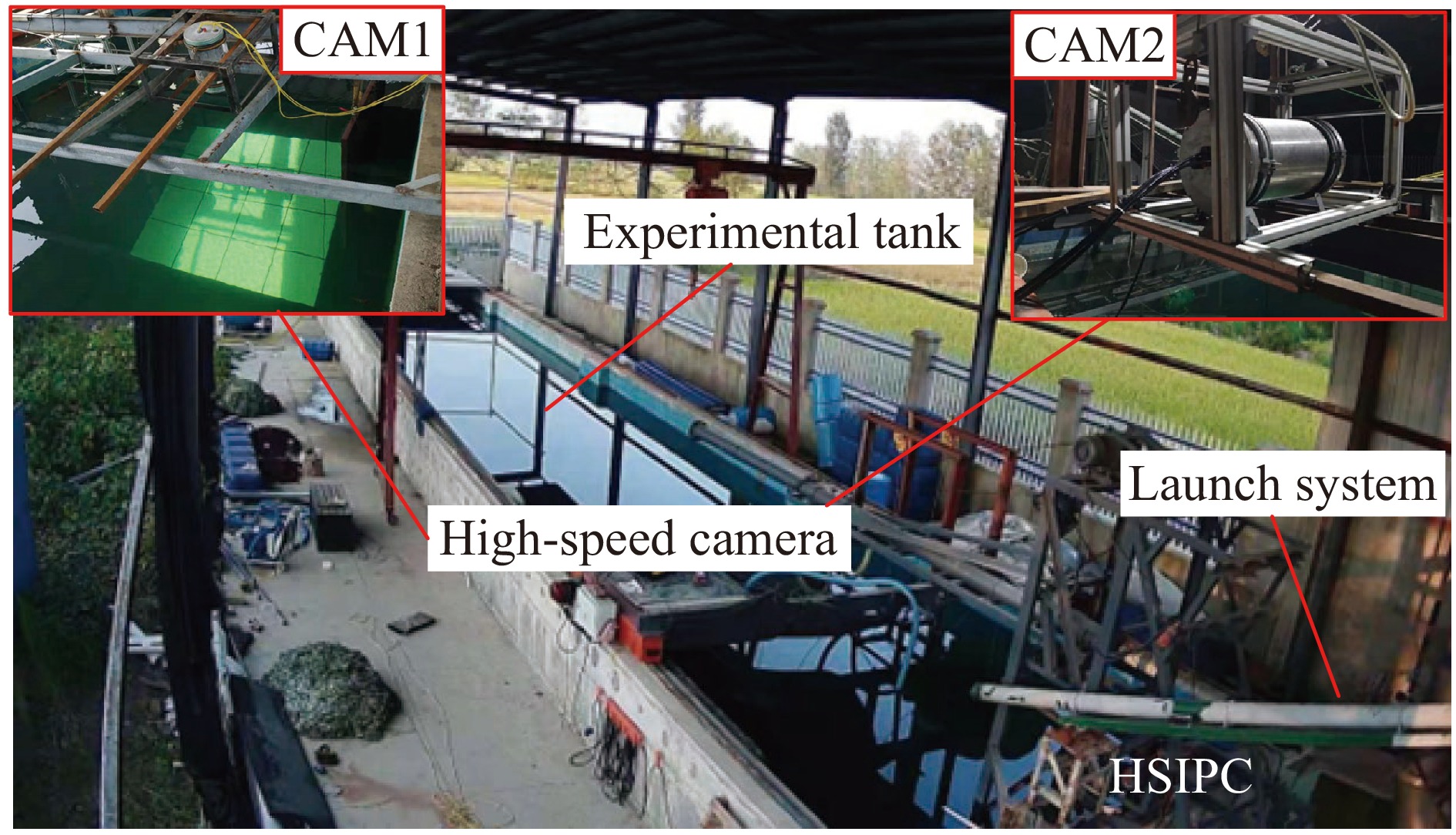
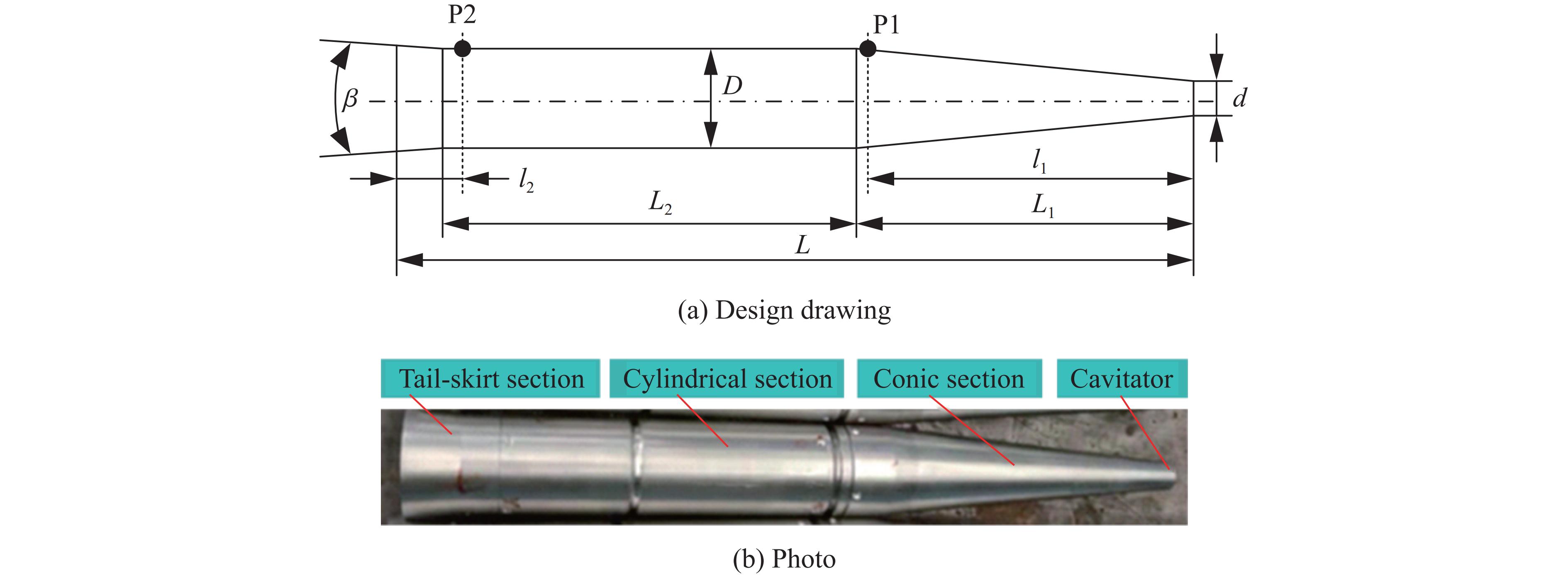
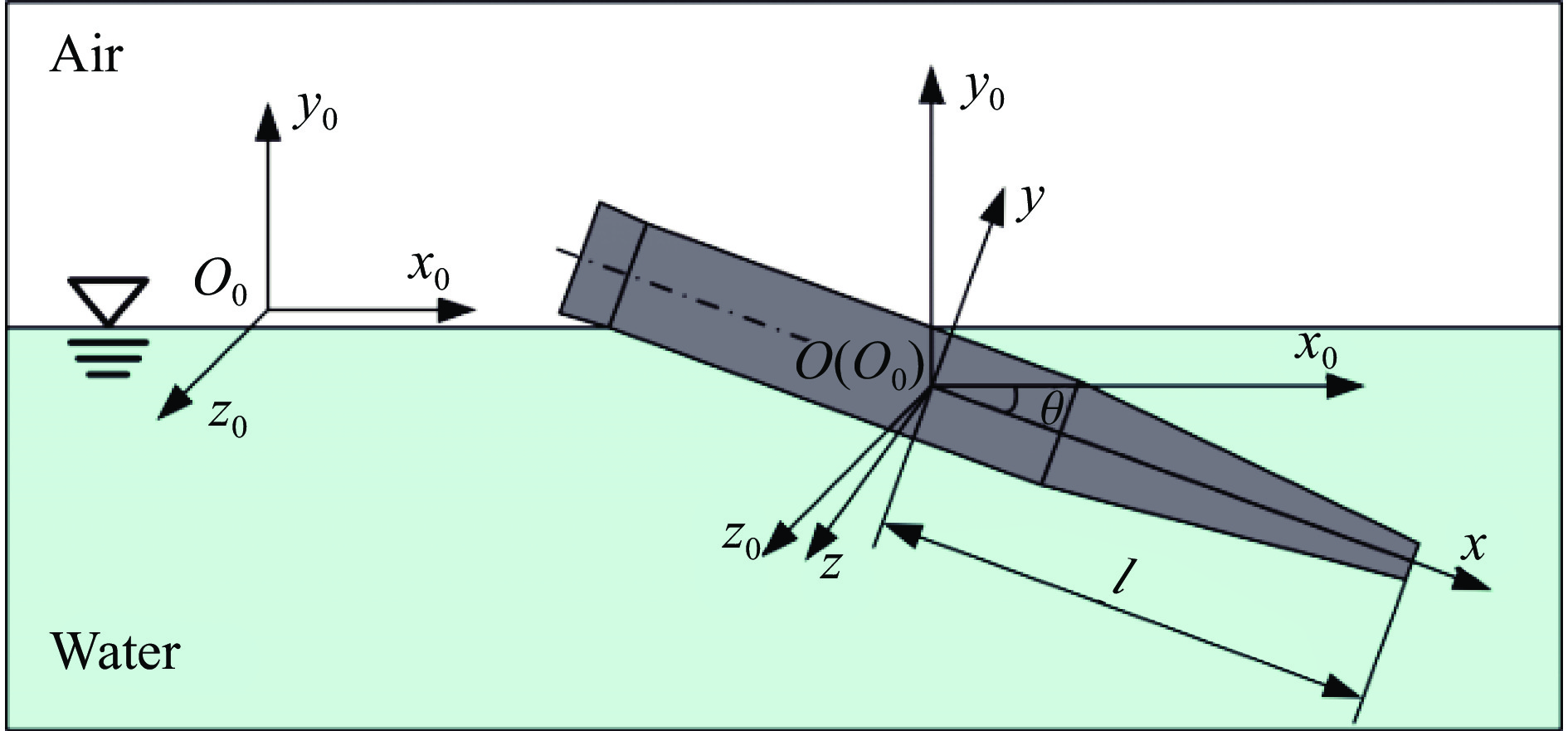
摘要: 为了研究带尾裙跨介质航行体高速斜入水过程中空泡的发展及运动特性,搭建了高速入水实验平台,并设计了带有内测单元的实验模型,对带尾裙跨介质航行体开展了入水角为20°、入水速度为30~130 m/s的实验研究。采用高速摄像机记录入水空泡,同时由内测单元测量航行体的运动参数和泡内压力,获得了航行体高速斜入水过程中空泡的发展特性、入水运动特性以及泡内压力的变化规律。实验结果表明:带尾裙跨介质航行体在入水过程中形成了滑行运动特性,入水空泡发生弯曲变形现象,随着入水速度的升高,入水弹道向上偏转的趋势更加明显;航行体入水轴向过载峰值作用时间较长,法向过载峰值在入水1.5倍航行体长度后逐渐降至零值附近波动;泡内压力随入水空泡的形成和发展呈现先降低后升高的趋势,且最低压力随入水速度呈线性趋势,形成时间基本一致。Abstract: To study the cavity development and motion characteristics of the trans-media vehicle with tail-skirt during the process of oblique water entry at high velocity, a high-speed water-entry experiment at platform was built, and an experimental model with inertial measurement unit system was designed. The experimental study was carried out on the trans-media vehicle model with tail-skirt when the water-entry angle was 20° and the water-entry velocity ranged from 30 m/s to 130 m/s. A high-velocity camera was used to record the cavity during water entry, and the inertial measurement unit was used to measure the motion parameters of the vehicle and the pressure inside the cavity. The cavity development characteristics, the motion characteristics and the changing law of the pressure inside the cavity during the high-velocity oblique water entry were obtained. The experimental results show that the planning motion characteristics was formed during the water-entry process of the trans-media vehicle with tail-skirt, and the bending deformation of the cavity occurred. With the increase of the water entry velocity, the upward deflection trend of the water-entry trajectory became more obvious. The peak axial load of the vehicle entering water lasted for a long interval, so load reduction should be considered in the process of crossing media. The peak normal load gradually dropped to about zero after entering the water 1.5 times the length of the vehicle. During the high-velocity water-entry process, the upper surface of the trans-media vehicle was always wrapped in the cavity. The pressure inside the cavity decreased first and then increased with the formation and development of the cavity. The minimum pressure changed linearly with the water entry velocity, while the formation time was basically the same.
-

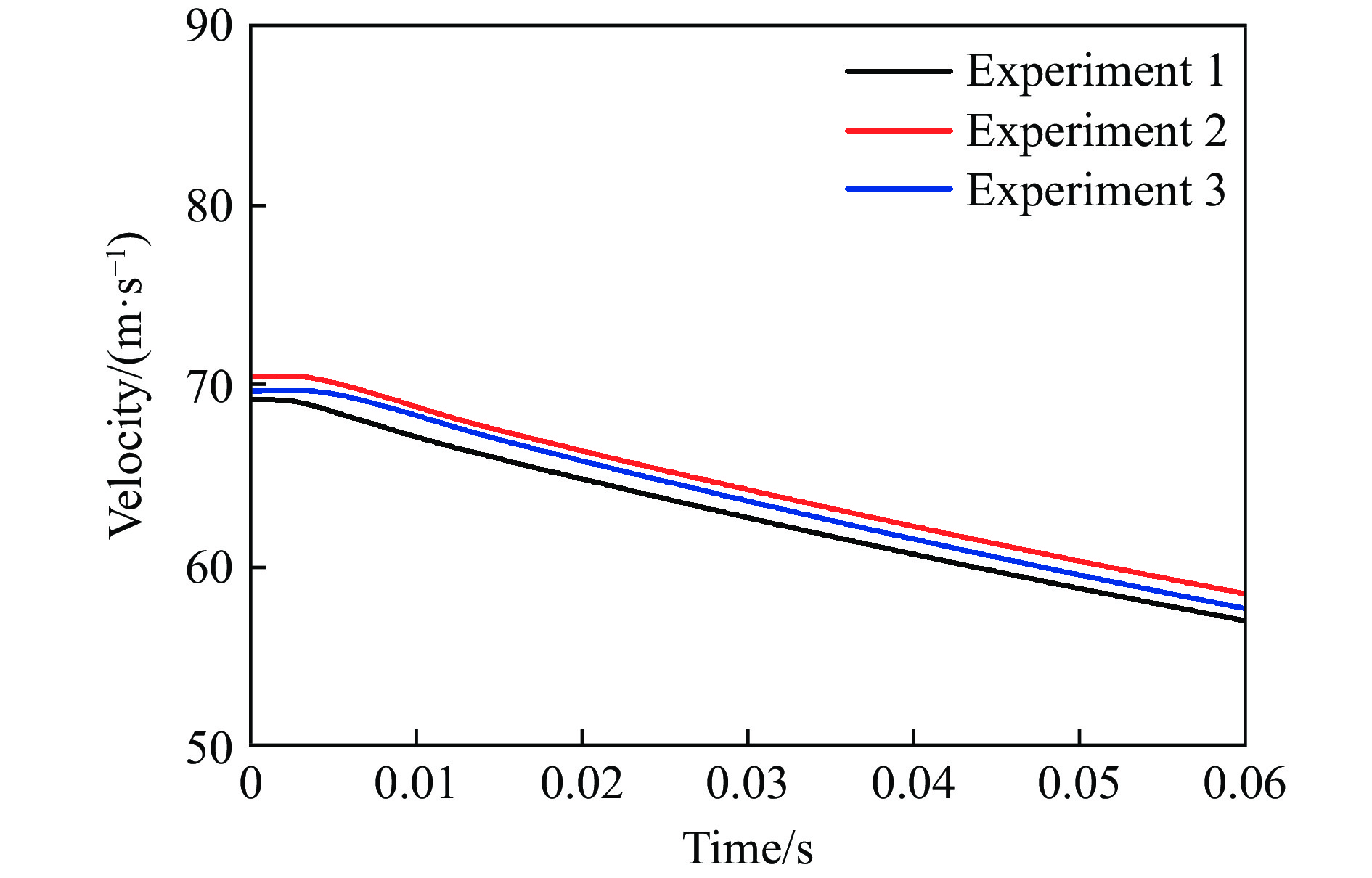
图 7 重复性实验的速度曲线对比
Figure 7. Comparison of velocity curves among threerepeatability experiments

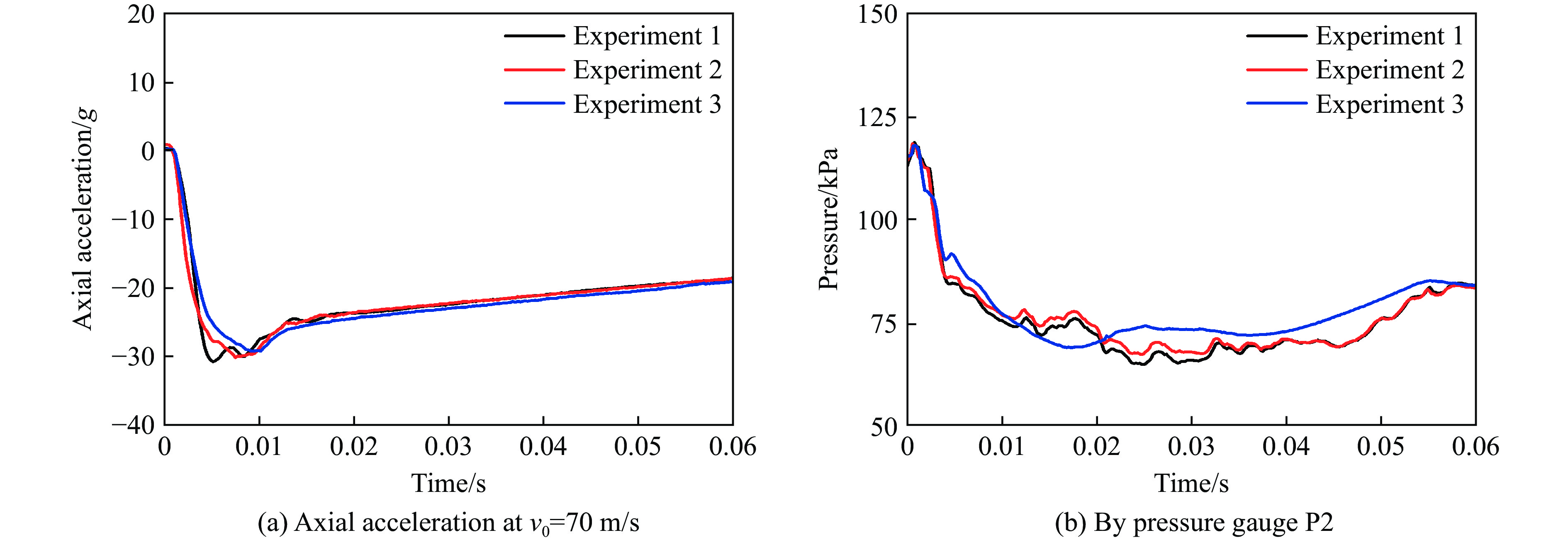
图 8 入水速度70 m/s时入水过程中测量单元重复性实验结果的对比
Figure 8. Comparison of repeatability experiment results at the measuring unit during the water-entry process of the vehicle with the water-entry velocity of 70 m/s

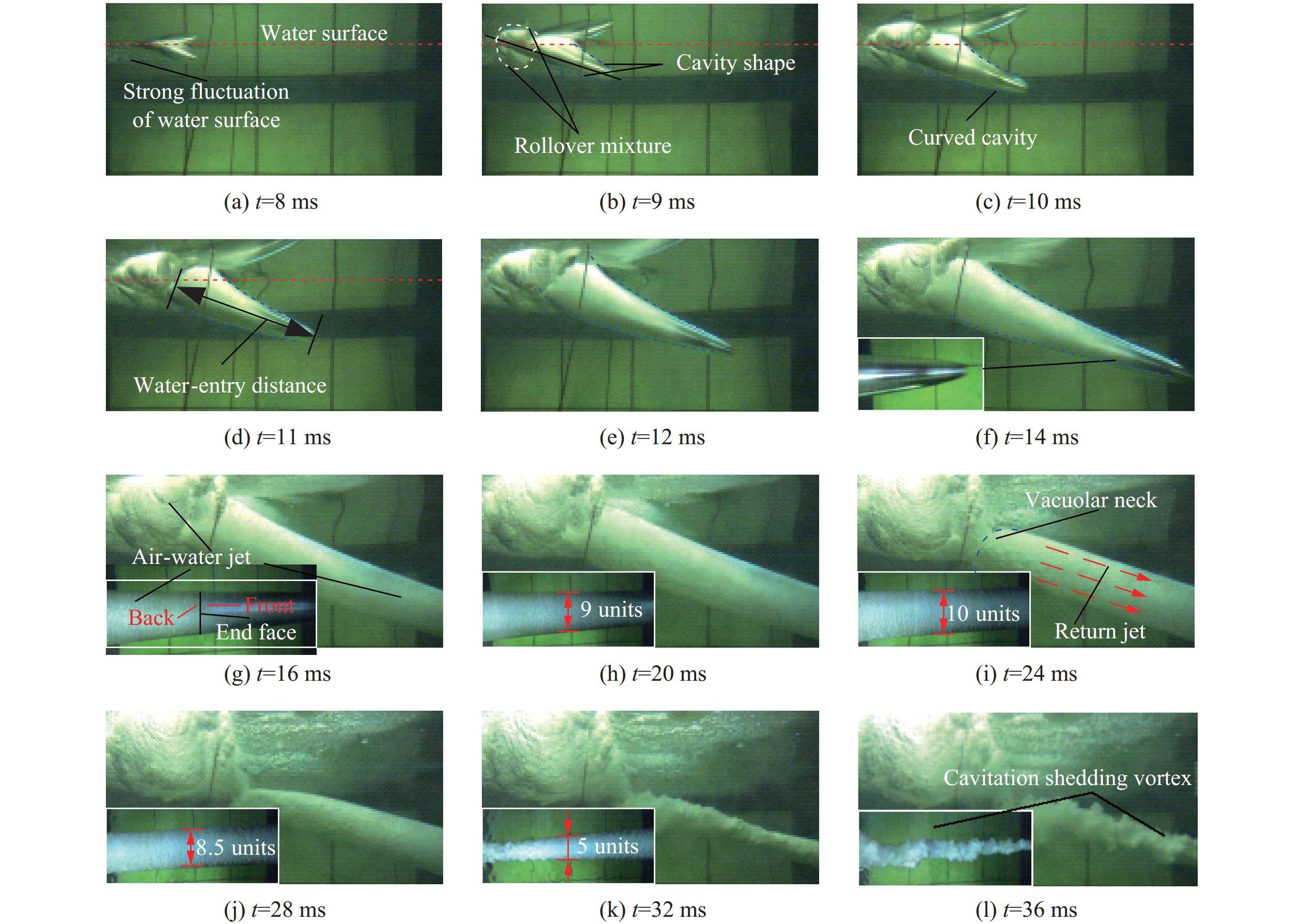
图 9 跨介质航行体入水的空泡发展过程
Figure 9. Water-entry cavity development of the trans-media vehicle

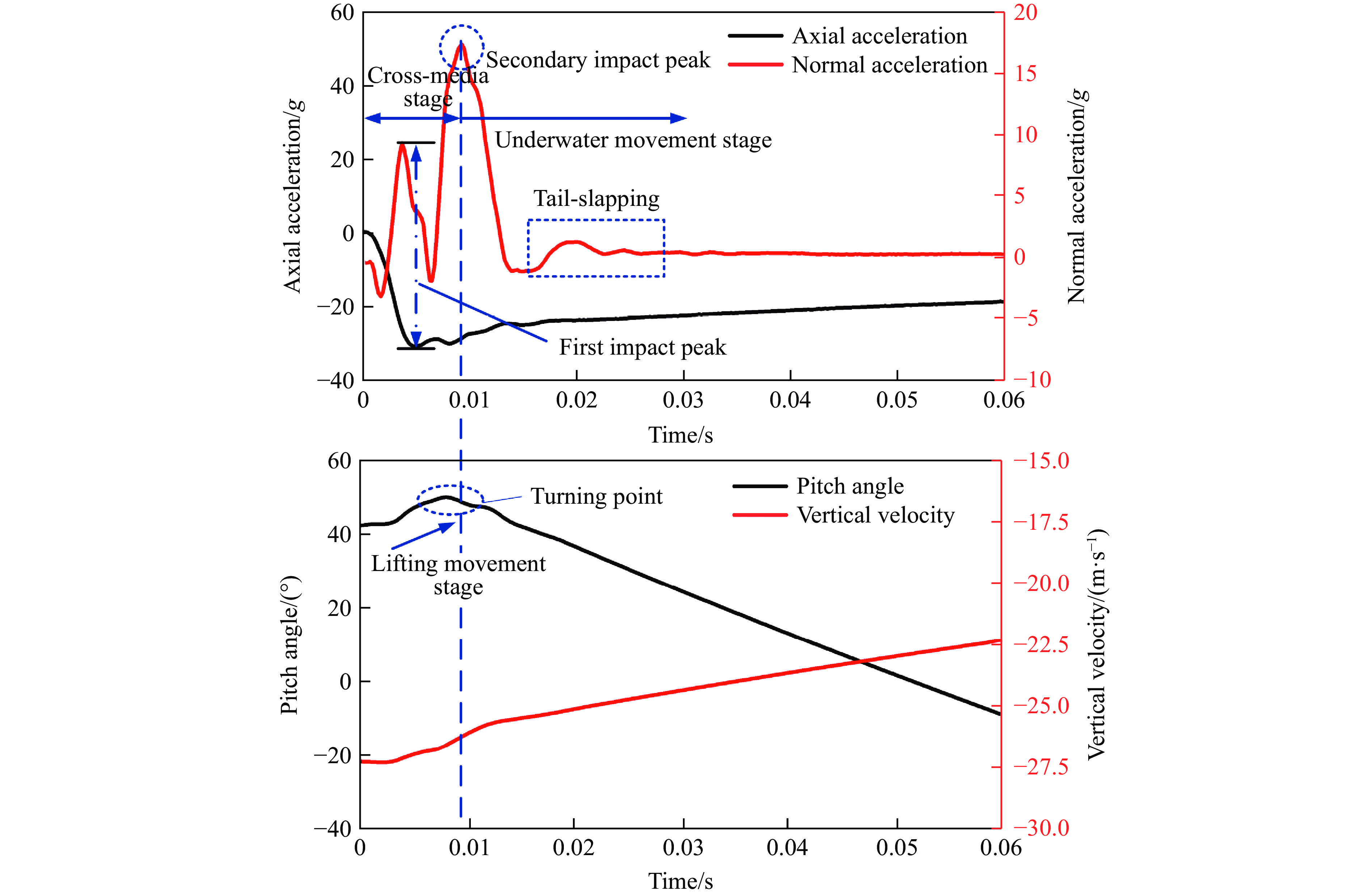
图 10 入水速度70 m/s入水过程的航行体过载特性和运动参数随时间的变化
Figure 10. Overload characteristics and motion parameters of vehicle varying with time during the water-entry process of the vehicle with the water-entry velocity of 70 m/s

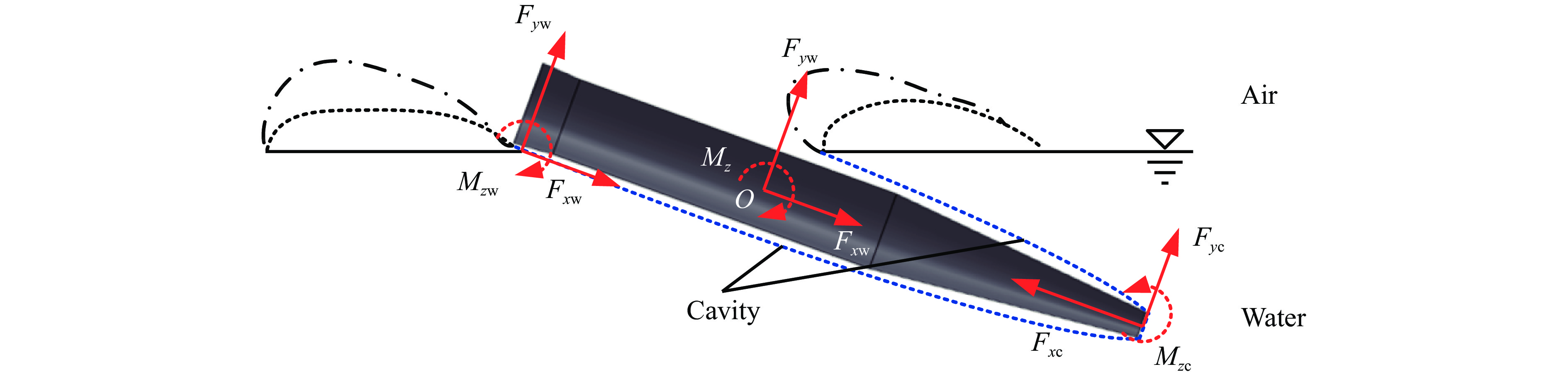
图 11 尾裙入水的受力分析
Figure 11. Schematic diagram of forces on the tail-skirt at the time of water-entry

图 12 不同入水速度时的载荷特性曲线
Figure 12. Load characteristics curves at different water-entry velocities

图 13 入水速度70 m/s入水过程中压力传感器P1和P2测得的压力曲线
Figure 13. Pressure curves obtained by the pressure gauges P1 and P2 during the water-entry process ofthe vehicle with the water-entry velocity of 70 m/s

图 14 不同入水速度下压力传感器P1的压力特性
Figure 14. Pressure characteristics obtained by pressure gauge P1 at different water-entry velocities

图 15 不同入水速度下的运动弹道参数
Figure 15. Motion trajectory parameters under different water-entry velocities

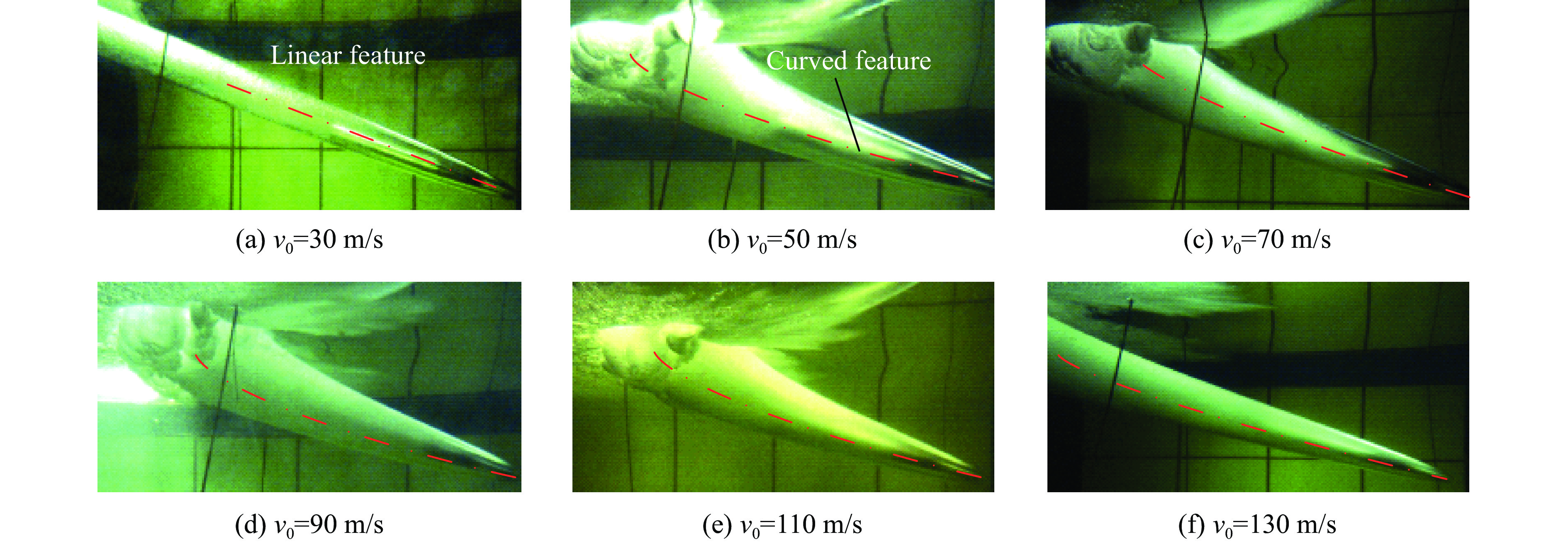
图 16 不同入水速度的空泡特征
Figure 16. Cavity characteristics under different water-entry velocities
表 1 不同入水速度时轴向和法向过载特性
Table 1. Characteristics of axial and normal overloads at different water-entry velocities
v0/(m·s−1) 轴向过载 法向过载 Ax,max/g Δt/ms Ay,avg/g s/L 30 12.0 13.0 3.5 1.491 50 13.3 11.0 6.5 1.492 70 30.4 9.8 8.2 1.496 90 38.6 8.2 8.3 1.495 110 56.8 7.4 12.5 1.497 130 73.8 5.9 17.8 1.505 注:根据文献[23]计算滑行周期内法向过载的均值。  下载: 导出CSV
下载: 导出CSV
-
[1] LI D J, LI F J, SHI Y Z, et al. A novel hydrodynamic layout of front vertical rudders for maneuvering underwater supercavitating vehicles [J]. Ocean Engineering, 2020, 215: 107894. DOI: 10.1016/j.oceaneng.2020.107894. [2] 栗夫园, 党建军, 张宇文. 带锥形空化器超空泡航行体的空泡与力学特性 [J]. 江苏大学学报 (自然科学版), 2017, 38(2): 161–167. DOI: 10.3969/j.issn.1671-7775.2017.02.007.LI F Y, DANG J J, ZHANG Y W. Cavity and hydrodynamic features of supercavitating vehicle with conical cavitator [J]. Journal of Jiangsu University (Natural Science Edition), 2017, 38(2): 161–167. DOI: 10.3969/j.issn.1671-7775.2017.02.007. [3] 马庆鹏, 何春涛, 王聪, 等. 球体垂直入水空泡实验研究 [J]. 爆炸与冲击, 2014, 34(2): 174–180. DOI: 10.11883/1001-1455(2014)02-0174-07.MA Q P, HE C T, WANG C, et al. Experimental investigation on vertical water-entry cavity of sphere [J]. Explosion and Shock Waves, 2014, 34(2): 174–180. DOI: 10.11883/1001-1455(2014)02-0174-07. [4] 王恒, 孙铁志, 路中磊, 等. 球体入水空泡演变和运动特性影响试验研究 [J]. 爆炸与冲击, 2019, 39(12): 123901. DOI: 10.11883/bzycj-2018-0415.WANG H, SUN T Z, LU Z L, et al. Experimental study on the cavity evolution and motion characteristics of spheres into water [J]. Explosion and Shock Waves, 2019, 39(12): 123901. DOI: 10.11883/bzycj-2018-0415. [5] 黄振贵, 王瑞琦, 陈志华, 等. 90°锥头弹丸不同速度下垂直入水冲击引起的空泡特性 [J]. 爆炸与冲击, 2018, 38(6): 1189–1199. DOI: 10.11883/bzycj-2018-0115.HUANG Z G, WANG R Q, CHEN Z H, et al. Experimental study of cavity characteristic induced by vertical water entry impact of a projectile with a 90° cone-shaped head at different velocities [J]. Explosion and Shock Waves, 2018, 38(6): 1189–1199. DOI: 10.11883/bzycj-2018-0115. [6] 邱海强, 袁绪龙, 王亚东, 等. 回转体高速垂直入水冲击载荷和空泡形态仿真 [J]. 鱼雷技术, 2013, 21(3): 161–164. DOI: 10.3969/j.issn.1673-1948.2013.03.001.QIU H Q, YUAN X L, WANG Y D, et al. Simulation on impact load and cavity shape in high speed vertical water entry for an axisymmetric body [J]. Torpedo Technology, 2013, 21(3): 161–164. DOI: 10.3969/j.issn.1673-1948.2013.03.001. [7] 张伟, 郭子涛, 肖新科, 等. 弹体高速入水特性实验研究 [J]. 爆炸与冲击, 2011, 31(6): 579–584. DOI: 10.11883/1001-1455(2011)06-0579-06.ZHANG W, GUO Z T, XIAO X K, et al. Experimental investigation on behaviors of projectile high-speed water entry [J]. Explosion and Shock Waves, 2011, 31(6): 579–584. DOI: 10.11883/1001-1455(2011)06-0579-06. [8] 郭子涛, 张伟, 郭钊, 等. 截卵形弹水平入水的速度衰减及空泡扩展特性 [J]. 爆炸与冲击, 2017, 37(4): 727–733. DOI: 10.11883/1001-1455(2017)04-0727-07.GUO Z T, ZHANG W, GUO Z, et al. Characteristics of velocity attenuation and cavity expansion induced by horizontal water-entry of truncated-ogive nosed projectile [J]. Explosion and Shock Waves, 2017, 37(4): 727–733. DOI: 10.11883/1001-1455(2017)04-0727-07. [9] 施红辉, 胡青青, 陈波, 等. 钝体倾斜和垂直冲击入水时引起的超空泡流动特性实验研究 [J]. 爆炸与冲击, 2015, 35(5): 617–627. DOI: 10.11883/1001-1455(2015)05-0617-08.SHI H H, HU Q Q, CHEN B, et al. Experimental study of supercavitating flows induced by oblique and vertical water entry of blunt bodies [J]. Explosion and Shock Waves, 2015, 35(5): 617–627. DOI: 10.11883/1001-1455(2015)05-0617-08. [10] 罗驭川, 黄振贵, 高建国, 等. 截锥体头型弹丸低速倾斜入水实验研究 [J]. 爆炸与冲击, 2019, 39(11): 113902. DOI: 10.11883/bzycj-2018-0498.LUO Y C, HUANG Z G, GAO J G, et al. Experiment research of low-speed oblique water-entry of truncated cone-shaped projectile [J]. Explosion and Shock Waves, 2019, 39(11): 113902. DOI: 10.11883/bzycj-2018-0498. [11] 侯宇, 黄振贵, 郭则庆, 等. 超空泡射弹小入水角高速斜入水试验研究 [J]. 兵工学报, 2020, 41(2): 332–341. DOI: 10.3969/j.issn.1000-1093.2020.02.015.HOU Y, HUANG Z G, GUO Z Q, et al. Experimental investigation on shallow-angle oblique water-entry of a high-speed supercavitating projectile [J]. Acta Armamentarii, 2020, 41(2): 332–341. DOI: 10.3969/j.issn.1000-1093.2020.02.015. [12] 陈晨. 小型运动体亚/跨声速入水多相流动特性研究 [D]. 哈尔滨: 哈尔滨工业大学, 2019: 36–47.CHEN C. Multiphase flow characteristics of subsonic and transonic water-entry for small moving body [D]. Harbin, Heilongjiang, China: Harbin Institute of Technology, 2019: 36–47. [13] 陈诚, 袁绪龙, 邢晓琳, 等. 预置舵角下超空泡航行体倾斜入水弹道特性研究 [J]. 兵工学报, 2018, 39(9): 1780–1785. DOI: 10.3969/j.issn.1000-1093.2018.09.015.CHEN C, YUAN X L, XING X L, et al. Research on the trajectory characteristics of supercavitating vehicle obliquely entering into water at preset rudder angle [J]. Acta Armamentarii, 2018, 39(9): 1780–1785. DOI: 10.3969/j.issn.1000-1093.2018.09.015. [14] 刘如石, 郭则庆, 张辉. 尾部形状对超空泡射弹尾拍运动影响的数值研究 [J]. 兵工学报, 2023, 44(10): 2984–2994. DOI: 10.12382/bgxb.2022.0689.LIU R S, GUO Z Q, ZHANG H. Numerical simulation on the influence of tail shapes on the tail-slap of supercavitating projectiles [J]. Acta Armamentarii, 2023, 44(10): 2984–2994. DOI: 10.12382/bgxb. 2022.0689. [15] 张衡. 尾型对超空化航行器水动力特性的影响研究 [D]. 西安: 西北工业大学, 2015.ZHANG H. Stern hydrodynamic characteristics of supercavitation vehicle research [D]. Xi’an, Shaanxi, China: Northwestern Polytechnology University, 2015. [16] 王科燕, 邓飞, 张衡, 等. 超空泡航行器扩张尾裙流体动力特性试验研究 [J]. 西安交通大学学报, 2016, 50(1): 53–58. DOI: 10.7652/xjtuxb201601009.WANG K Y, DENG F, ZHANG H, et al. Experimental research on hydrodynamic characteristics of supercavitating vehicle expansion sterns [J]. Journal of Xi’an Jiaotong University, 2016, 50(1): 53–58. DOI: 10.7652/xjtuxb201601009. [17] 袁绪龙, 张宇文, 刘乐华. 空泡外形测量与分析方法研究 [J]. 实验力学, 2006, 21(2): 215–219. DOI: 10.3969/j.issn.1001-4888.2006.02.016.YUAN X L, ZHANG Y W, LIU L H. On methods of cavity profile measurement and analysis [J]. Journal of Experimental Mechanics, 2006, 21(2): 215–219. DOI: 10.3969/j.issn.1001-4888.2006.02.016. [18] 刘喜燕, 袁绪龙, 罗凯, 等. 预置舵角对跨介质航行体入水尾拍运动影响试验 [J]. 兵工学报, 2023, 44(6): 1632–1642. DOI: 10.12382/bgxb.2022.1117.LIU X Y, YUAN X L, LUO K, et al. Experiment on the influence of preset rudder angle on the tail-slapping motion of a trans-media vehicle during water entry [J]. Acta Armamentarii, 2023, 44(6): 1632–1642. DOI: 10.12382/bgxb.2022.1117. [19] 赵成功, 王聪, 魏英杰, 等. 细长体水下运动空化流场及弹道特性实验 [J]. 爆炸与冲击, 2017, 37(3): 439–446. DOI: 10.11883/1001-1455(2017)03-0439-08.ZHAO C G, WANG C, WEI Y J, et al. Experiment of cavitation and ballistic characteristics of slender body under movement [J]. Explosion and Shock Waves, 2017, 37(3): 439–446. DOI: 10.11883/1001-1455(2017)03-0439-08. [20] 陈诚, 袁绪龙, 党建军, 等. 超空泡航行器20°角倾斜入水冲击载荷特性试验研究 [J]. 兵工学报, 2018, 39(6): 1159–1164. DOI: 10.3969/j.issn.1000-1093.2018.06.016.CHEN C, YUAN X L, DANG J J, et al. Experimental investigation into impact load during oblique water-entry of a supercavitating vehicle at 20° [J]. Acta Armamentarii, 2018, 39(6): 1159–1164. DOI: 10.3969/j.issn.1000-1093.2018.06.016. [21] 刘富强, 罗凯, 梁红阁, 等. 回转体滑水航行流体动力特性研究 [J]. 西北工业大学学报, 2021, 39(1): 101–110. DOI: 10.3969/j.issn.1000-2758.2021.01.013.LIU F Q, LUO K, LIANG H G, et al. Reasearch on hydrodynamic characteristics of cylinder planning [J]. Journal of Northwestern Polytechnical University, 2021, 39(1): 101–110. DOI: 10.3969/j.issn.1000-2758.2021.01.013. [22] 刘喜燕, 罗凯, 袁绪龙, 等. 扩张尾裙对跨介质航行器高速入水转平弹道特性影响 [J]. 力学学报, 2023, 55(2): 343–354. DOI: 10.6052/0459-1879-22-427.LIU X Y, LUO K, YUAN X L, et al. Influence of expansion sterns of the flatting trajectory characteristics of a trans-media vehicle during high speed water entry [J]. Chinese Journal of Theoretical and Applied Mechanics, 2023, 55(2): 343–354. DOI: 10.6052/0459-1879-22-427. [23] 陈诚. 超空泡航行器尾拍作用机理与动力学建模 [D]. 西安: 西北工业大学, 2019.CHEN C. Investigation of the mechanism of tail slapping and dynamic modeling of supercavitating vehicles [D]. Xi’an, Shaanxi, China: Northwestern Polytechnical University, 2019. [24] 时素果, 杨晓光, 王亚东, 等. 细长体高速入水过程压力特性试验研究 [J]. 应用力学学报, 2018, 35(2): 223–227, 445. DOI: 10.11776/cjam.35.02.A009.SHI S G, YANG X G, WANG Y D, et al. Experimental study on the pressure characteristic of high-speed slender body water entry [J]. Chinese Journal of Applied Mechanics, 2018, 35(2): 223–227, 445. DOI: 10.11776/cjam.35.02.A009. [25] 赵成功. 高速射弹非定常运动多相流场与弹道特性研究 [D]. 哈尔滨: 哈尔滨工业大学, 2017: 95–99.ZHAO C G. Research on multiphase flow and trajectory characteristics of unsteady movement of high speed projectile [D]. Harbin, Heilongjiang, China, Harbin Institute of Technology, 2017: 95–99. -




计量
- 文章访问数: 717
- HTML全文浏览量: 175
- PDF下载量: 87
- 被引次数: 0