



Synchronous and decoupling calibration of tri-axial impact force transducers based on a Hopkinson bar and an artificial neural network
-
摘要: 三分量冲击力载荷的同步激励与输入输出间的精准建模是三轴冲击力传感器标定所面临的主要挑战。为了实现对三轴冲击力传感器的有效标定,使其能够准确测量空间中的三维冲击力载荷。首先,基于Hopkinson杆与矢量分解原理建立了一种高幅值(104 N量级)、窄脉宽(10−4 s量级)可计量三分量冲击力载荷的同步激励方法,实现了对三轴冲击力传感器的同步加载。然后,基于最小二乘原理与矩阵微分构建了三轴冲击力传感器的线性标定模型,并通过改变子弹结构与冲击气压揭示了线性解耦标定模型中传感器主灵敏度系数与轴间耦合灵敏度系数并非固定常数而均与冲击力载荷脉冲构型(幅值、脉宽)相关的冲击特性。最后,将能够反映载荷构型信息的传感器各轴输出电压脉冲的幅值与脉宽作为影响因素,并以神经元的形式添加到人工神经网络(artificial neural network, ANN)的输入层,建立了基于ANN的三轴冲击力传感器输出电压与输入载荷间的代理模型,实现了数据驱动的三轴冲击力传感器非线性解耦标定。结果表明,相对最小二乘模型,ANN标定精度更高,采用ANN进行三轴冲击力传感器标定具有可行性和有效性。
-
关键词:
- 冲击力传感器 /
- 同步标定 /
- 神经网络 /
- 机器学习 /
- Hopkinson杆
Abstract: The impact force transducers are widely used in aerospace, national defense engineering, auto industry and other important fields involving national security and people livelihood. Those transducers usually need to be calibrated before being put into practical use. Realizing synchronous loading and developing an accurate mathematical model to describe the input-output relationship are the major challenges in the calibration of triaxial impact force transducers at this stage. In this paper, a method for the synchronous excitation of three-dimensional impact force loads was established based on a modified Hopkinson bar technique and the principle of vector decomposition. The triaxial impact force transducer being calibrated was mounted at an angle to the axis of the Hopkinson bar, the one-dimensional force excited in the Hopkinson bar was then decomposed onto each sensitive axis of the transducer, thus realizing its synchronous loading. The coupling effect between the sensitive axes of the transducer was assumed to be linear. A linear decoupling calibration model of the triaxial impact force transducer was built based on a sensitivity matrix containing three main sensitivity coefficients and six transverse sensitivity coefficients. The sensitivity matrix was solved using the least squares method. The amplitude and pulse width of the impact force pulses excited in the Hopkinson bar were adjusted by varying the structure and the impact velocity of the bullet. Reference impact force pulses with varied amplitudes and pulse widths were then used to calibrate the triaxial impact force transducer. Characteristics were revealed that both the main sensitivity coefficients and the transverse sensitivity coefficients of the transducer are related to the amplitude and the pulse width of the reference impact force. The amplitude and pulse width information of the input force pulses that the transducer was subjected to can be reflected by the output voltage pulses of the transducer. Therefore, the amplitude and pulse width of the output voltages of the sensitive axes of the transducer were taken as influencing factors and added to the input layer of the artificial neural network (ANN) in form of artificial neurons. A nonlinear decoupling calibration model for the tri-axial impact force transducer was then built based on an ANN model. The calibration results show that the ANN model has higher calibration accuracy compared to the least squares model. It is feasible and valid to use ANNs to calibrate the tri-axial impact force transducers.-
Key words:
- impact force transducers /
- synchronous calibration /
- neural network /
- machine learning /
- Hopkinson bar
-
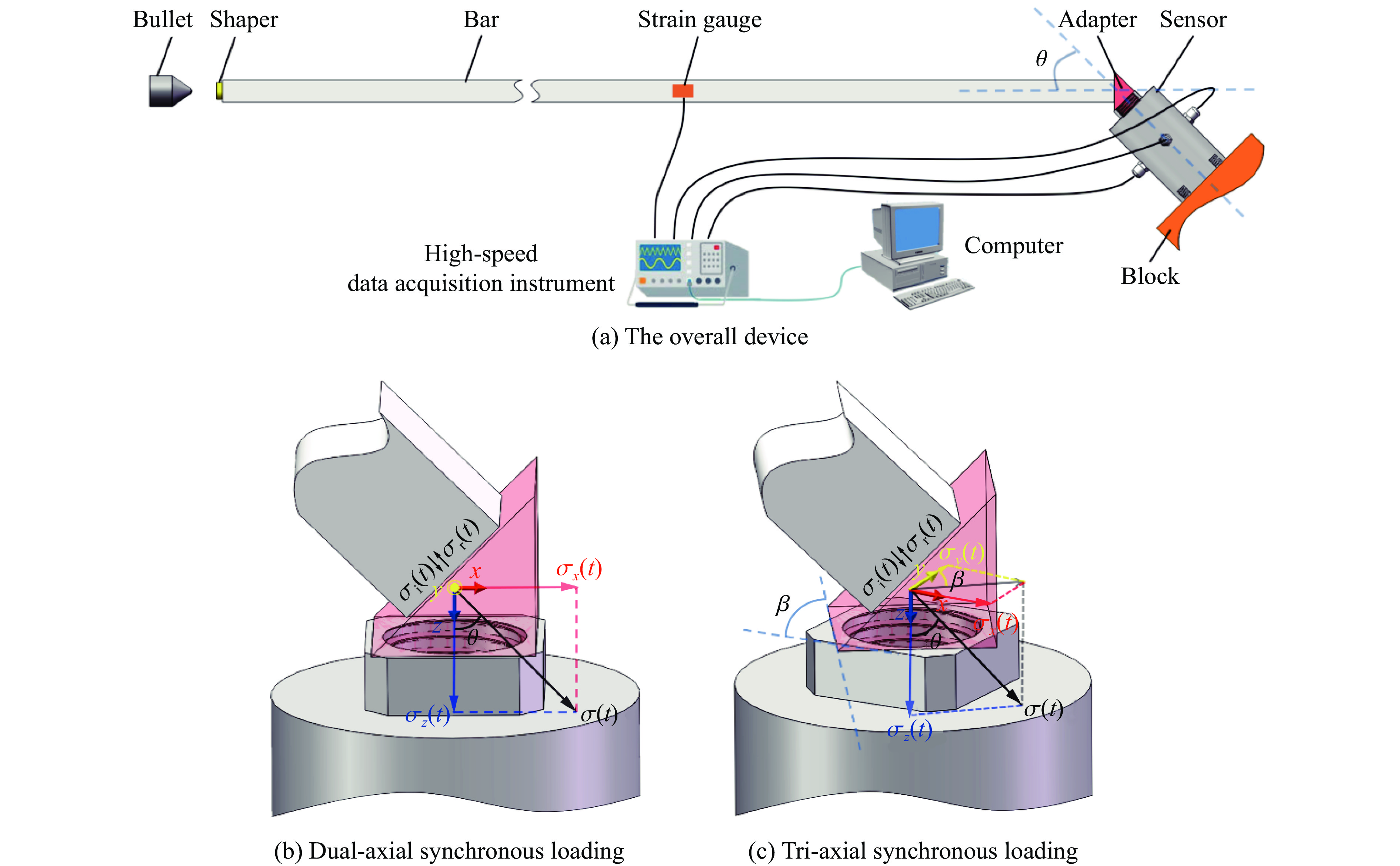
图 1 三轴冲击力传感器同步加载原理
Figure 1. The synchronous loading principle for tri-axial impact force transducers
图 2 基于ANN的非线性解耦标定原理图
Figure 2. Schematic diagram of the ANN-based nonlinear decoupling calibration model
图 6 基于有限单元法建立的实验装置的数值模型
Figure 6. A numerical model built based on the finite element method for the experimental device

图 7 各采样点处的轴向应力峰值随截面到杆端距离的变化
Figure 7. Variation of the axial stress peak at each sampling point with the distance from the cross-section to the front end of the bar
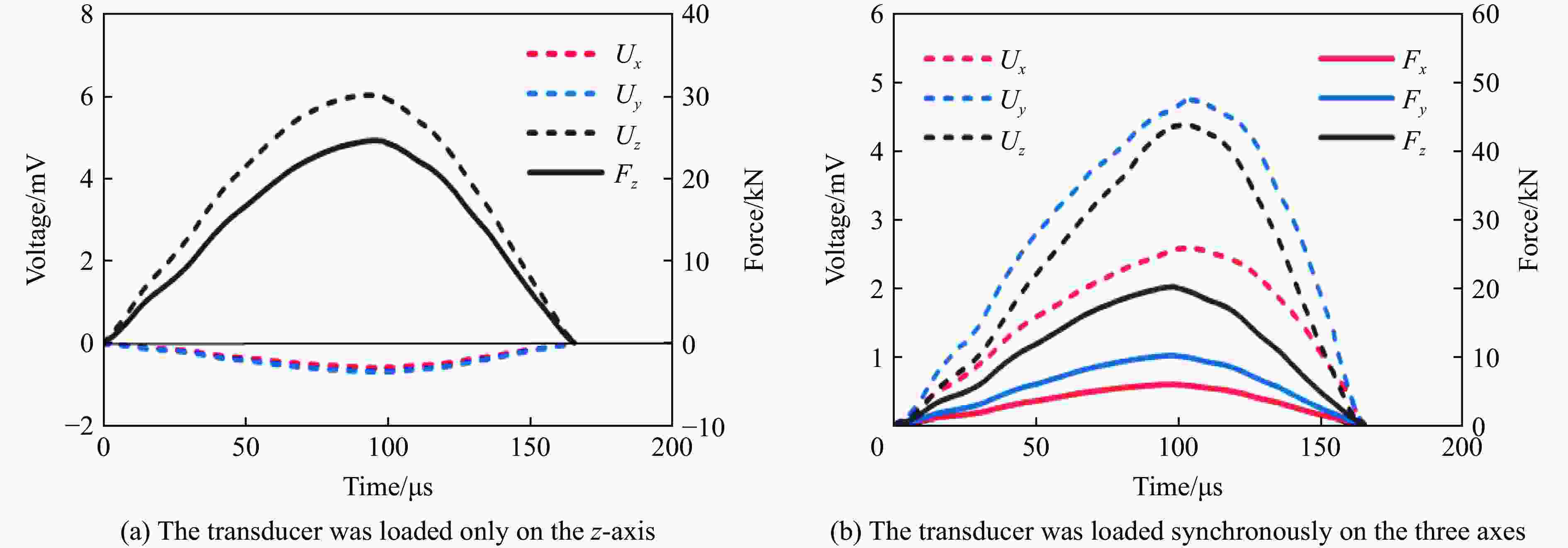
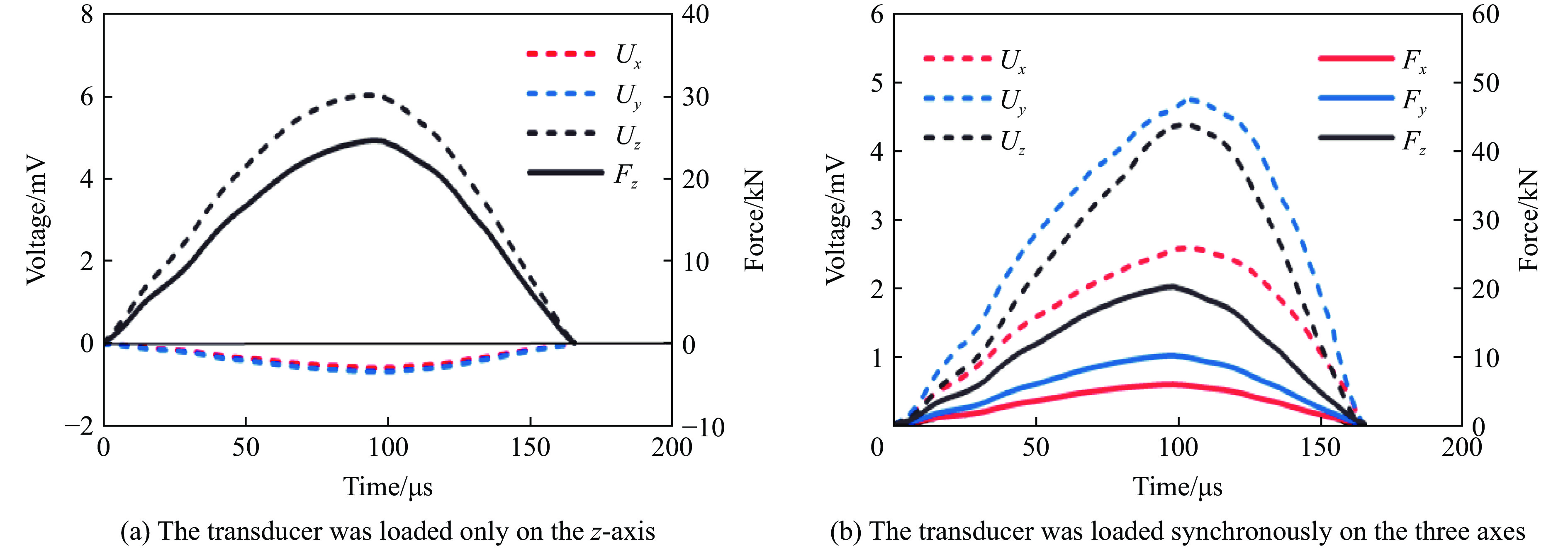
图 9 传感器的典型输入与输出
Figure 9. Typical inputs and outputs of the tri-axial force transducer
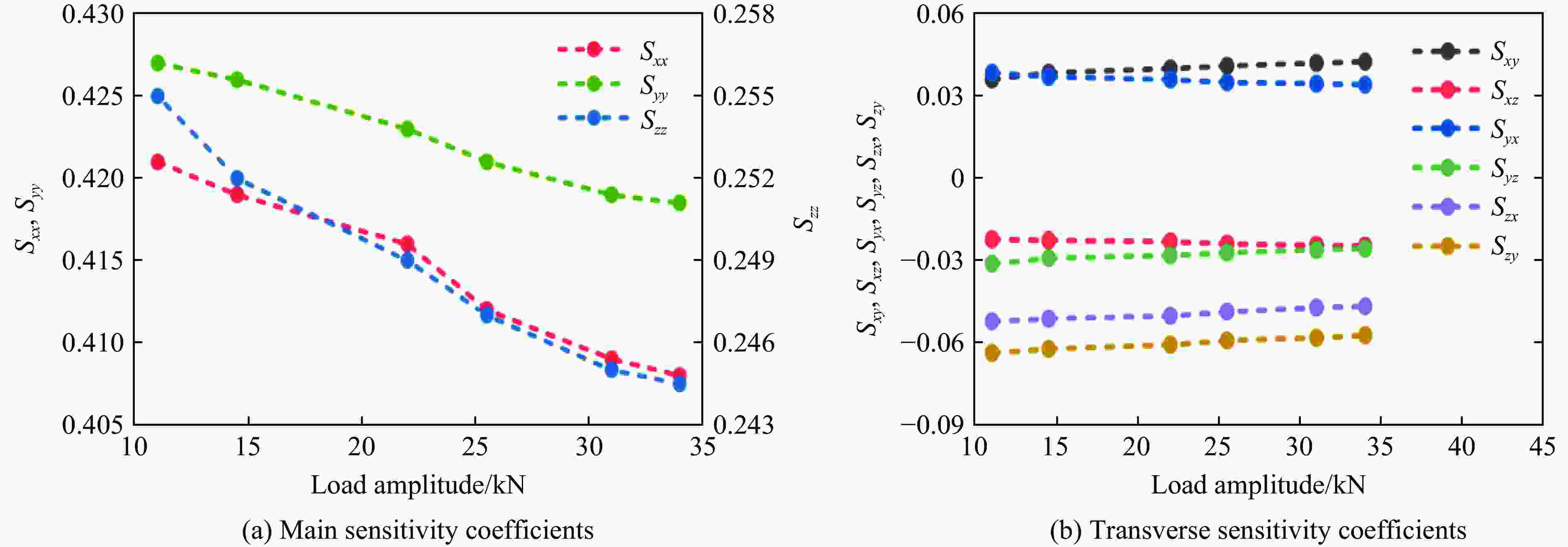
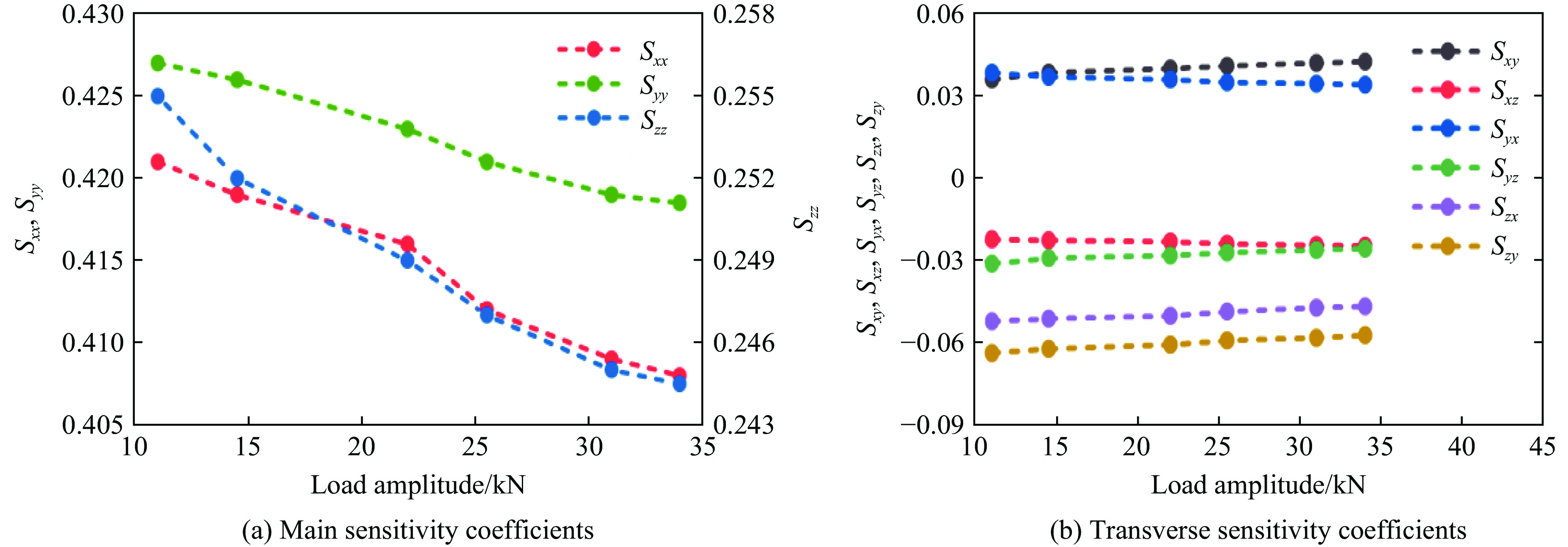
图 10 三轴冲击力传感器灵敏度系数随载荷幅值的变化
Figure 10. Variation of the sensitivity coefficients of the tri-axial impact force transducer with load amplitude
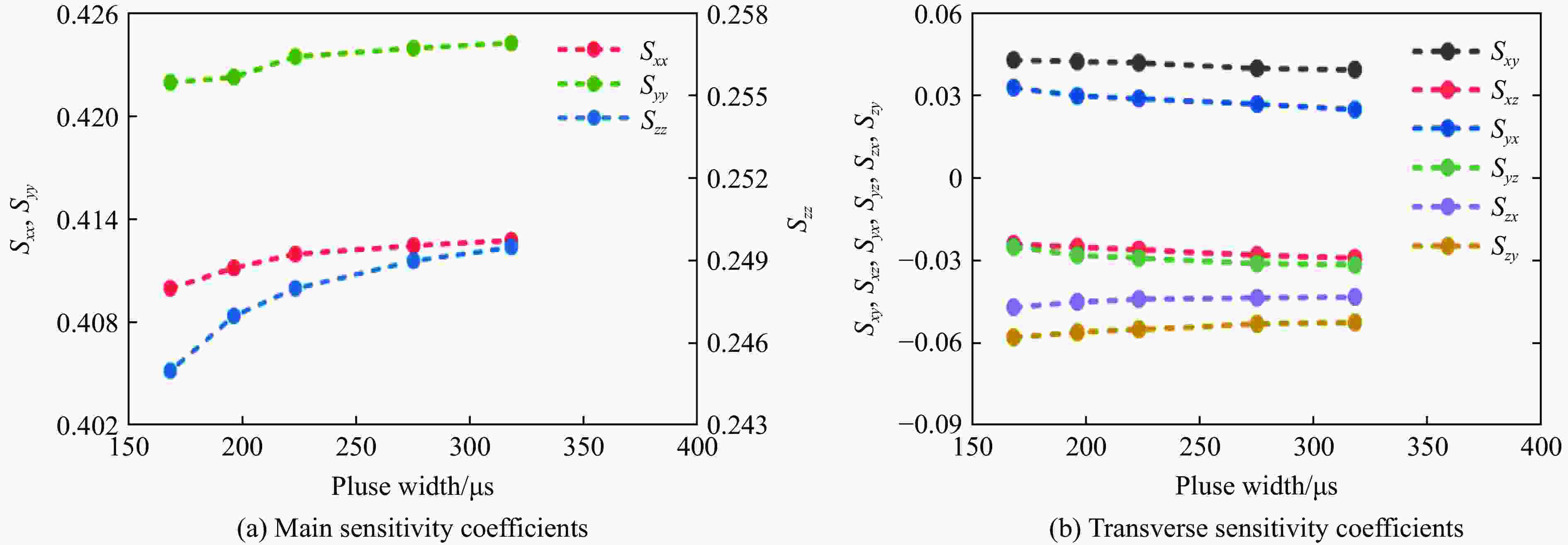
图 11 三轴冲击力传感器灵敏度系数随载荷脉宽的变化
Figure 11. Variation of the sensitivity coefficients of the tri-axial impact force transducer with pulse width
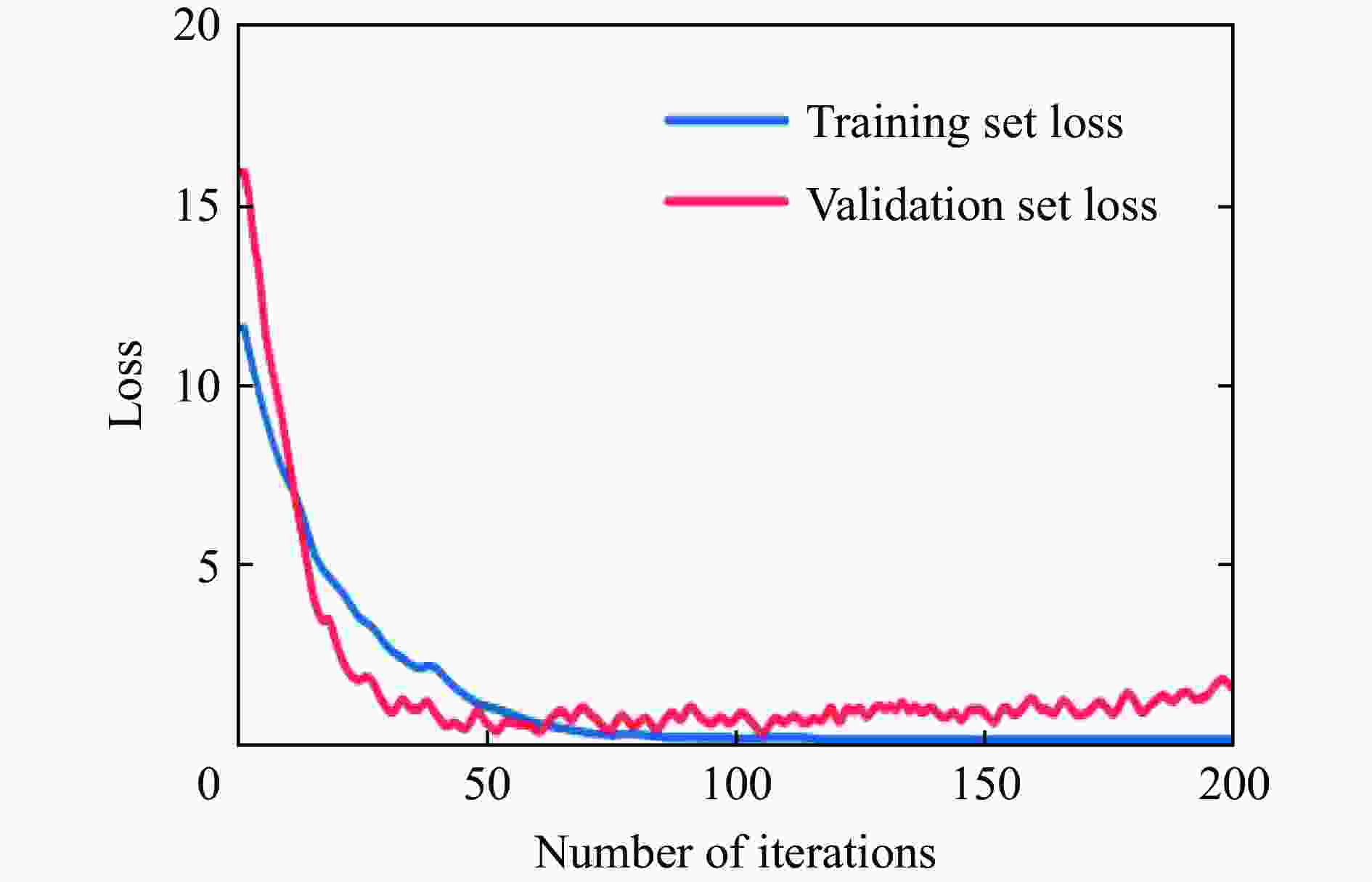
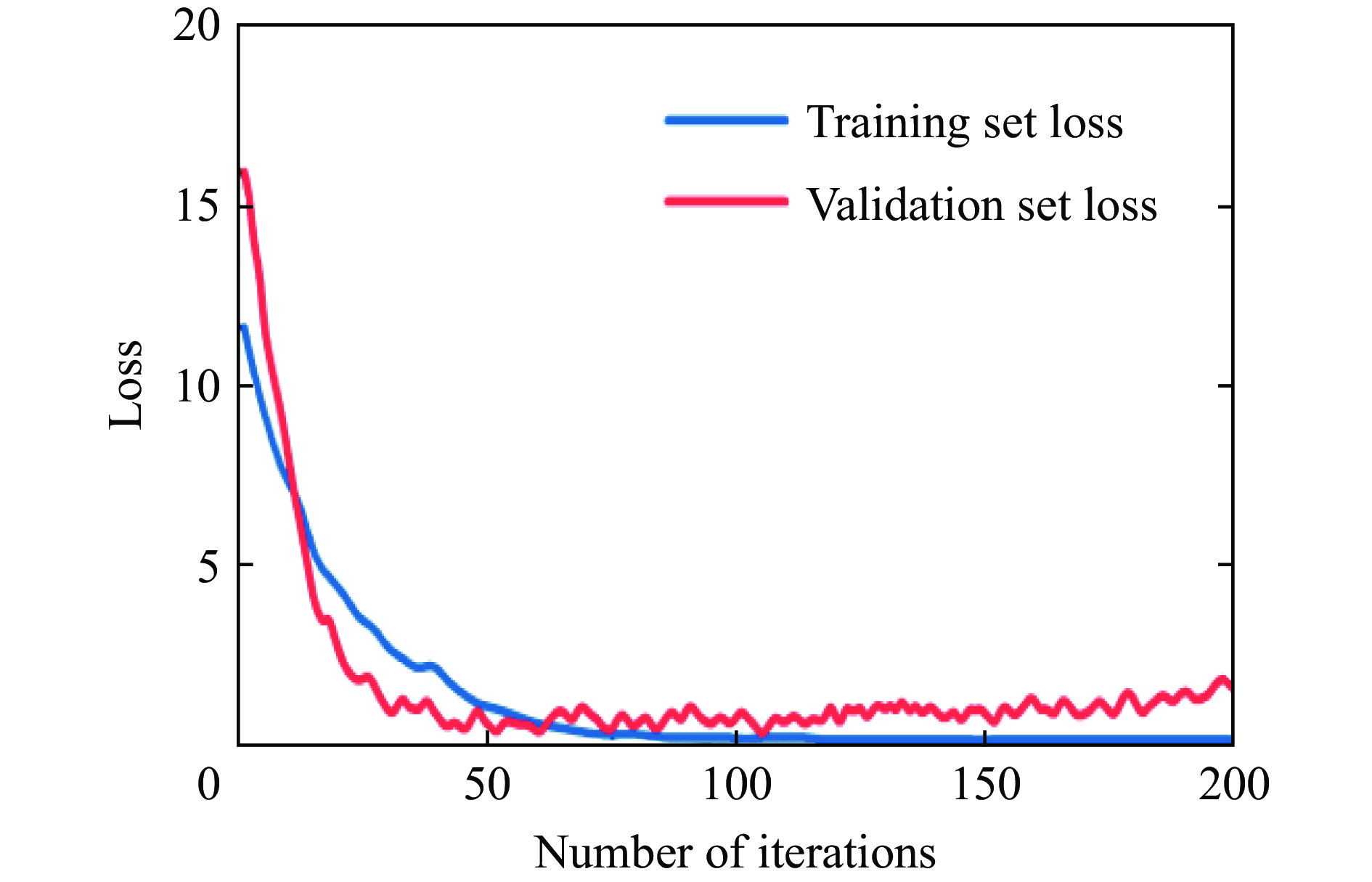
图 12 验证集及训练集的损失随迭代次数的变化
Figure 12. Variation of the losses of validation set and training set with the number of iterations
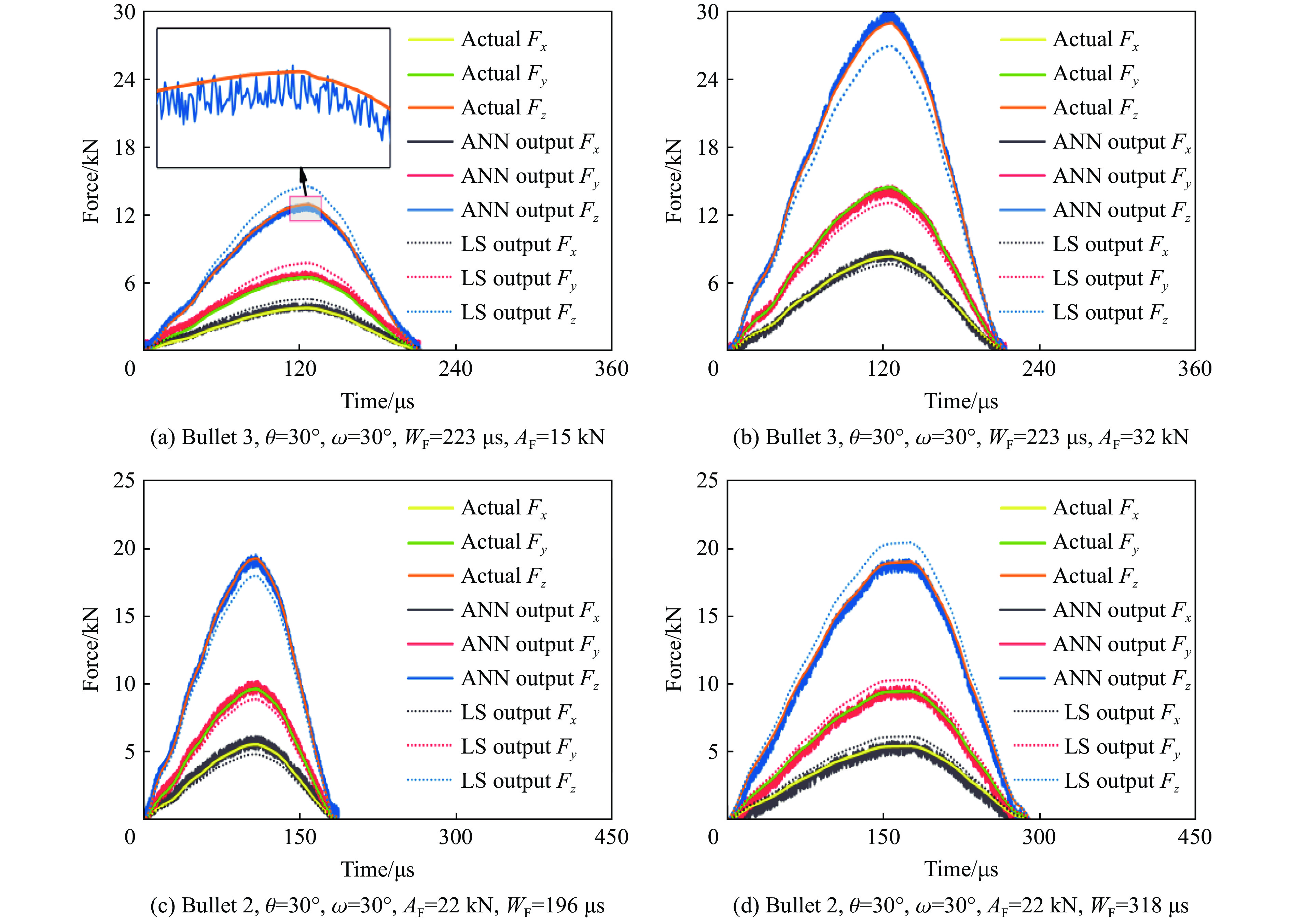
图 13 不同加载情形下标定模型精度对比
Figure 13. Comparison of the accuracy of the calibration models under different loading situations
表 1 B25B型三轴冲击力传感器的性能参数
Table 1. Parameters of a B25B tri-axial impact force transducer
测量轴 量程/
kN激励电压/
V一阶固有频率/
kHz灵敏度系数/
(mV·kN−1)x 15 10 12.275 0.480 y 15 10 12.275 0.480 z 30 10 12.273 0.223  下载: 导出CSV
下载: 导出CSV
-
[1] 郑晓静. 关于极端力学 [J]. 力学学报, 2019, 51(4): 1266–1272. DOI: 10.6052/0459-1879-19-189.ZHENG X J. Extreme mechanics [J]. Chinese Journal of Theoretical and Applied Mechanics, 2019, 51(4): 1266–1272. DOI: 10.6052/0459-1879-19-189. [2] 李波, 杨家斌, 舒亮, 等. 基于Galfenol合金的高灵敏度冲击力传感器 [J]. 机械工程学报, 2019, 55(8): 14–23. DOI: 10.3901/JME.2019.08.014.LI B, YANG J B, SHU L, et al. High sensitivity impact force sensor based on Galfenol alloy [J]. Journal of Mechanical Engineering, 2019, 55(8): 14–23. DOI: 10.3901/JME.2019.08.014. [3] DINOVITZER H A, LARONCHE A, ALBERT J. Fiber Bragg grating high impact force sensors with adjustable sensitivity and dynamic range [J]. IEEE Sensors Journal, 2019, 19(14): 5670–5679. DOI: 10.1109/JSEN.2019.2907867. [4] PARK Y K, KUMME R, KANG D I. Dynamic investigation of a three-component force-moment sensor [J]. Measurement Science and Technology, 2002, 13(5): 654–659. [5] PARK Y K, KUMME R, KANG D I. Dynamic investigation of a binocular six-component force-moment sensor [J]. Measurement Science and Technology, 2002, 13(8): 1311–1318. [6] SCHLEGEL C, KIECKENAP G, GLOCKNER B, et al. Traceable periodic force calibration [J]. Metrologia, 2012, 49(3): 224–235. DOI: 10.1088/0026-1394/49/3/224. [7] FUJII Y. Toward establishing dynamic calibration method for force transducers [J]. IEEE Transactions on Instrumentation and Measurement, 2009, 58(7): 2358–2364. DOI: 10.1109/TIM.2009.2014614. [8] SATRIA E, TAKITA A, NASBEY H, et al. New technique for dynamic calibration of a force transducer using a drop ball tester [J]. Measurement Science and Technology, 2018, 29(12): 125009. DOI: 10.1088/1361-6501/aaeb71. [9] 魏燕定. 标准负阶跃力的实现及其测量研究 [J]. 实验力学, 2001, 16(1): 7–12. DOI: 10.3969/j.issn.1001-4888.2001.01.002.WEI Y D. A study on the generation of standard negative step force and its measurement [J]. Journal of Experimental Mechanics, 2001, 16(1): 7–12. DOI: 10.3969/j.issn.1001-4888.2001.01.002. [10] 孙金锋, 谢殿煌, 张训文. 气动助推负阶跃力校准装置研究 [J]. 仪器仪表学报, 2010, 31(2): 459–463. DOI: 10.19650/j.cnki.cjsi.2010.02.037.SUN J F, XIE D H, ZHANG X W. Study of pneumatic push negative step force calibration device [J]. Chinese Journal of Scientific Instrument, 2010, 31(2): 459–463. DOI: 10.19650/j.cnki.cjsi.2010.02.037. [11] HU G Y, GAO Q, CAO H B, et al. Decoupling analysis of a six-dimensional force sensor bridge fault [J]. IEEE Access, 2017, 6: 7029–7036. DOI: 10.1109/ACCESS.2017.2784485. [12] YOU J J, WANG L K, XI F F, et al. Decoupling algorithm and maximum operation frequency of a novel parallel type six-axis accelerometer [J]. IEEE Sensors Journal, 2020, 20(21): 12637–12651. DOI: 10.1109/JSEN.2020.3001250. [13] TAN Y S, WANG X Y, REN L M. Design and experiment of a cardan-type self-decoupled and self-powered bending moment and torque sensor [J]. IEEE Transactions on Industrial Electronics, 2020, 68(6): 5366–5375. DOI: 10.1109/TIE.2020.2991931. [14] LIANG Q K, LONG J Y, COPPOLA G, et al. Novel decoupling algorithm based on parallel voltage extreme learning machine (PV-ELM) for six-axis F/M sensors [J]. Robotics and Computer-Integrated Manufacturing, 2019, 57: 303–314. DOI: 10.1016/j.rcim.2018.12.014. [15] LI Y J, WANG G C, YANG X, et al. Research on static decoupling algorithm for piezoelectric six axis force/torque sensor based on LSSVR fusion algorithm [J]. Mechanical Systems and Signal Processing, 2018, 110: 509–520. DOI: 10.1016/j.ymssp.2018.03.015. [16] 李映君, 韩彬彬, 王桂从, 等. 基于径向基函数神经网络的压电式六维力传感器解耦算法 [J]. 光学精密工程, 2017, 25(5): 1266–1271. DOI: 10.3788/OPE.20172505.1266.LI Y J, HAN B B, WANG G C, et al. Decoupling algorithms for piezoelectric six-dimensional force sensor based on RBF neural network [J]. Optics and Precision Engineering, 2017, 25(5): 1266–1271. DOI: 10.3788/OPE.20172505.1266. [17] 谢石林, 陈胜来, 张希农, 等. 传感器标定的神经网络杂交建模方法 [J]. 机械工程学报, 2010, 46(22): 6–15. DOI: 10.3901/JME.2010.22.006.XIE S L, CHEN S L, ZHANG X N, et al. Neural network Hybrid modeling method for transducer calibration [J]. Journal of Mechanical Engineering, 2010, 46(22): 6–15. DOI: 10.3901/JME.2010.22.006. [18] LI T L, ZHENG H, PAN A Q, et al. BP Method With Rectified Linear Unit-Based Nonlinear Decoupling for 3-Axis FBG Force Sensor [J]. IEEE Sensors Journal, 2021, 21(3): 2972–2979. DOI: 10.1109/JSEN.2020.3022663. [19] GOODFELLOW I, BENGIO Y, COURVILLE A. 深度学习[M]. 赵申剑, 黎彧君, 符天凡, 等译. 北京: 人民邮电出版社, 2017: 8–15. [20] 郭伟国, 李玉龙, 索涛. 应力波基础简明教程[M]. 西安: 西北工业大学出版社, 2007: 26–42. [21] LIANG Q K, WU W N, COPPOLA G, et al. Calibration and decoupling of multi-axis robotic force/moment sensors [J]. Robotics and Computer-Integrated Manufacturing, 2018, 49: 301–308. DOI: 10.1016/j.rcim.2017.08.008. [22] 姚斌, 张建勋, 代煜, 等. 用于微创外科手术机器人的多维力传感器解耦方法研究 [J]. 仪器仪表学报, 2020, 41(1): 147–153. DOI: 10.19650/j.cnki.cjsi.J1905479.YAO B, ZHANG J X, DAI Y, et al. Research on decoupling method of multi-dimensional force sensor used in minimally invasive surgical robot [J]. Chinese Journal of Scientific Instrument, 2020, 41(1): 147–153. DOI: 10.19650/j.cnki.cjsi.J1905479. [23] 姜力, 刘宏, 蔡鹤皋. 多维力/力矩传感器静态解耦的研究 [J]. 仪器仪表学报, 2004, 25(3): 284–287. DOI: 10.3321/j.issn:0254-3087.2004.03.002.JIANG L, LIU H, CAI H G. Nonlinear static decoupling of multi-axis force/torque sensor [J]. Chinese Journal of Scientific Instrument, 2004, 25(3): 284–287. DOI: 10.3321/j.issn:0254-3087.2004.03.002. [24] 周志华. 机器学习[M]. 北京: 清华大学出版社, 2016: 97−120. -






计量
- 文章访问数: 989
- HTML全文浏览量: 301
- PDF下载量: 85
- 被引次数: 0